英语原文共 44 页,剩余内容已隐藏,支付完成后下载完整资料
《下肢驱动设计与实现》(部分翻译)
第三章 液压驱动的外骨骼
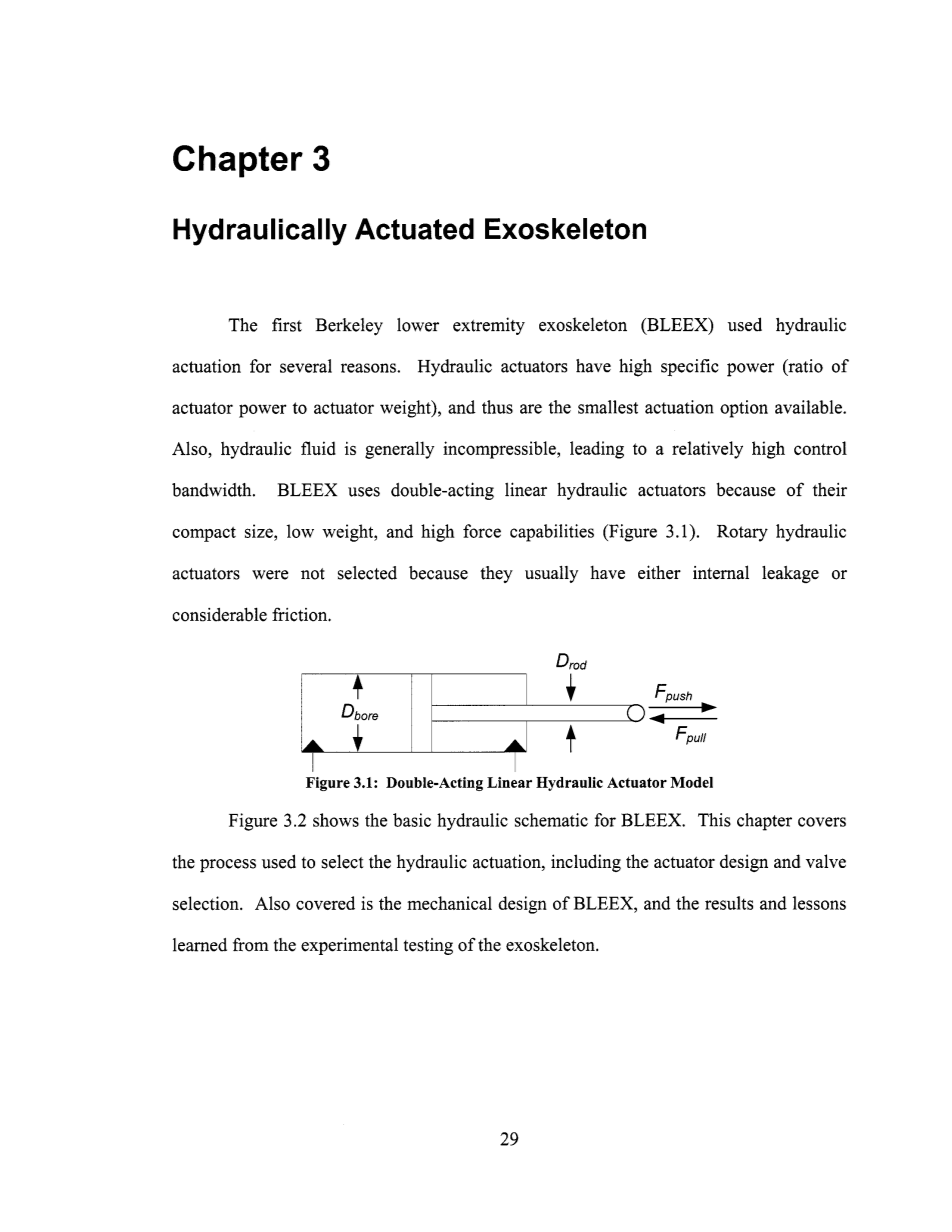
最初的伯克利下肢外骨骼(BLEEX)采用液压驱动是基于以下几个原因。一、液压执行器有较高的功率系数(驱动功率与驱动重量的比),因而是可利用的最小的启动选项。此外,液压流体一般是不可压缩的,从而导致相对较高的控制带宽。布利克斯采用双作用线性液压执行器由于其紧凑的尺寸,低重量,动力大(图3.1)。没有选择旋转液压执行器,因为它们通常有内部泄漏或相当大的摩擦。
图3.1 作用线性液压执行器模型
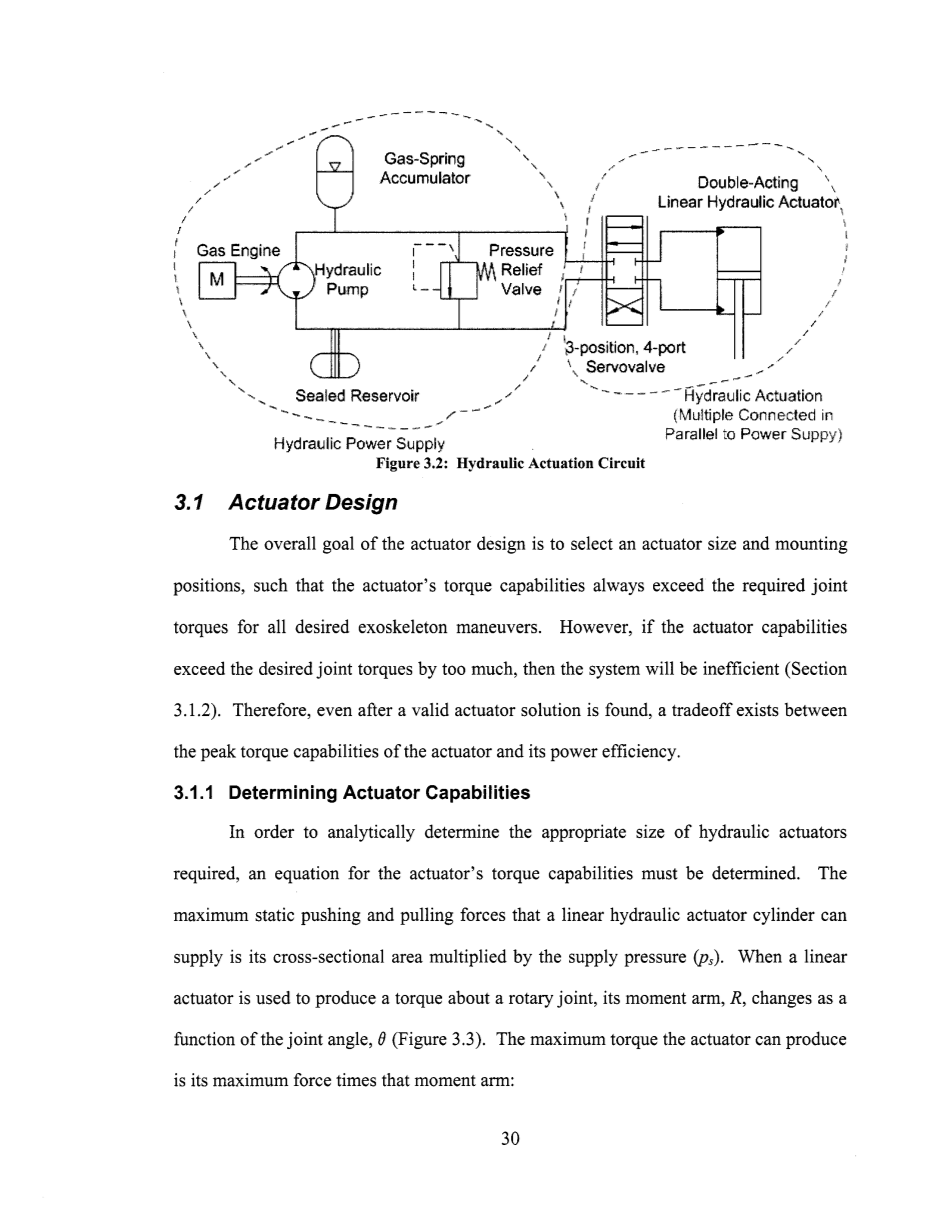
图3.2显示了基本的液压原理图BLEEX的基本液压原理图。本章包括选择液压驱动的过程,包括执行机构的设计和阀门的选择。还包括是布利克斯的机械设计,结果和教训,从骨骼的实验测试。
图3.2:液压驱动电路
3.1执行器的设计
执行器设计的总体目标是选择执行器的尺寸和安装位置,使得致动器的扭矩能力总是超过所需的所有关节外机动所需的关节力矩。然而,如果执行能力超过所需的关节力矩太大,则系统将无效(见3.1.2)。因此,即使在一个有效的致动器的解决方案被发现后,存在的峰值扭矩能力的致动器和其功率效率之间的权衡。
3.1.1确定驱动器的大小
为了分析确定所需液压致动器的适当大小,必须确定执行器扭矩能力的方程式。线性液压执行器气缸能够提供的最大静推力和拉力是它的横截面积乘以供给压力(ps),当一个线性致动器用来产生一个旋转关节的力矩时,它的力臂,R,随着关节角的变化而变化,theta;(图3.3)。执行器能产生的最大扭矩是最大力乘以力矩臂:
其中Dbore是执行器的孔径和Drod是传动杆直径。
图3.3 旋转关节的直线执行机构的三角结构
如果气缸的一端安装在远端连接的接头(X1,Y1),气缸的另一端安装到近端连接的接头(X2,Y2)当theta;=0,则力臂R可以用公式3.4计算。
为了简化公式3.3和公式3.5,安装位置(x1,y1)和(X1,Y2)可以重新定义使用柱面坐标(图3.4):
图3.4 圆柱坐标下的圆柱安装位置
使用这些替换,执行器矢量A和力矩臂R简化如下:
通常,最容易理解执行器扭矩随着角度变化的方法是画出它们之间的函数关系图。图3.5是根据公式3.1和公式3.2针对一组特定安装点、供应压力和气缸直径绘制的示例。对于本例,致动器具有最大力矩臂,因此当theta;=45°时,能产生最大扭矩。然而,当theta;=115°的力臂时是7倍小,所以致动器产生的扭矩能力要低得多。
图3.5 液压执行机构性能的举例
3.1.1确定功率要求
液压阀是用来调节执行器中的供水压力下降到所需的压力,来提供想要的关节力矩Tdes,这种阀门的压降导致液压驱动系统效率低下。假设储层压力Pr,保持在零,由于液压阀,P1oss(失去的动力)可计算如下:
其中theta;DES是理想的关节角速度,QS和QR是液压流量进入和退出的执行机构,分别和Tmax,push当驱动器是变长或Tmax,pull当执行器长度缩短。
能量的损失是从Ti到Tf峰值驱动力矩和所需的舵机力矩之间的差的积分:
使用公式3.13,提供了能量损失可视化的简单方法,从而损失的功率,在一定程度上是由多少的致动器的峰值扭矩超过预期关节力矩机动的角度范围内的运动所产生。
3.1.3计算执行器端点
一个执行机构的选择比较复杂的部分是寻找一个有效的几何可致动器。执行器几何形状可用的变量如表3.1所示,如图3.6所示:
theta;p:关节运动范围最大角度
theta;n:关节运动范围最小角度
LS:执行器长度最短。
LL:最长执行器长度(ls 行程)
R1:近端安装点距关节轴
theta;1:近端安装点垂直角度
r2:远端安装点距关节轴
theta;2:远端安装角度从垂直角度(当theta; = 0)
表3.1 线性致动器几何变量描述
图3.6 执行器的几何解
在运动范围的极限处,远端安装点的位置可以通过公式3.14通过公式3.17计算:
使用的缸全行程,执行机构应在其最长长度LL,最后关节的运动范围(或运算)和最短长度LS,在关节的运动范围的另一端(theta;n或theta;p),可以配置两种方式解决安装要点:1)执行器长度=LL @ theta;=theta;p和长度=Ls @ theta;=theta;2或者2)驱动器的长度=LL @ theta;=theta;p和长度=Ls @ theta;=theta;2(如图3.6展示了第二种情况)。
LL和LS的弧长,以远端安装点,当theta; = theta;p时,相交于近端安装点的位置:
配置一:
配置二:
将这些方程与公式3.14通过公式3.17相结合,可以得到下列方程,这些方程可以同时求解,以确定致动器的安装点:
配置一:
配置二:
注意theta;1或theta;2总是出现在方程theta;2-theta;1。因此,可以将这两个几何变量组合成一个方程,进一步简化方程组,theta;21:
配置一:
配置二:
重新定义R:
求解方程组,无论是“配置1”或“2配置”设置必须选择7个几何变量(LL,LS,R1,R2,theta;21,theta;n,theta;P)的5个,剩下的两个变量可以用公式3.23或公式3.24解决。这些方程将产生零、一、或两个解。即使方程产生解,它们仍然可能无效。在整个关节运动范围内检查执行器长度是可以接受的,这一点很重要。
对于外骨骼设计,通常是关节运动范围(theta;n和theta;P)和驱动器长度(LL和ls)是已知的。然后选择一个剩余变量迭代过程(通常r1)和其他两个解决r2和theta;12)重复到一个有效的解决办法。
3.1.4 驱动选择
驱动设计的问题是找到一个致动器的横截面,执行器端点和供应压力,提供必要的扭矩相结合,但最大限度地减少液压消耗。由于布利克斯动力学接近人体腿部动态,执行机构产生一定的转矩大于为CGA数据走。此外,执行器必须始终达到预期的运动范围。能够产生最小标称转矩。一般来说,没有一个唯一的解决方案,但许多可行的可能性
由于操纵力矩能力的方程的复杂性,它们不能被解析地解决,以确定一个最优解。相反,采用迭代方法来确定一个好的、有效的解决方案。虽然有很多可能的方法来使用上面的信息来选择致动器的大小和安装位置,外骨骼,以下序列运作良好:
1)PS:选择系统供应压力(因为它影响每个关节)。
2)选择其中一个“第3.1.2配置”的讨论。
3)theta;n和theta;p:根据CGA数据选择适当的运动范围。
4)Dbore和Drod:选择一个驱动器内径(制造商将告诉你的杆直径)。
5)LL和ls:选择一个执行器行程长度(然后决定LL和ls).
6)R1:选择从关节轴到近端安装位置的距离。
7)r2、theta;21:利用公式3.23和公式3.24解出r2和theta;21(0, 1,或2个解)。
8)如果在步骤7中零的解决方案,然后转到步骤15。
9)从步骤7中使用Eq. 3.26检查任何解决方案,看看该解决方案是否适用于关节的整个运动范围。如果解决方案是无效的15步走。
10)Tmax,push和Tmax,pull:利用公式3.1和公式3.2计算出执行器的扭矩能力的联合的整个范围。
11)所有所需的外骨骼的演习,验证Tmax,push或Tmax,pull总是超过预期的关节力矩。同时确保实际能力总是超过标称的最小扭矩值来防止系统达到奇点。如果所需的关节力矩不超过执行机构的能力或违反最小扭矩值,则转到步骤15。
12)如果执行器的功能总是超过执行器的能力,存储可能的执行器解决方案。使用公式3.12,计算所需机动的功率损失。然后调整步骤1到6中设置的至少一个参数,然后从步骤7重新开始,尝试找到另一个执行器解决方案。减少功耗(从以后的步骤中更频繁更有效地调整参数)。
13)同样重要的是检查驱动器是否能导致机械设计的有效接合。许多执行机构的安排可能导致致动器干扰机械结构或关节结构/轴承,或者是关节的某些点需要能够承受一定的强度。(详见第3.1.6)
14)在不再调整变量以满足转矩要求的前提下,降低整体功率要求,并将选定的执行器尺寸和安装成功地应用到机械设计中,找到了良好的驱动方案。
15)为了找到可行的驱动解决方案,在步骤1至6中调整至少一个参数,并从步骤7重新开始。一般来说,这些参数是在步骤1中对系统的最大影响对步骤6中的系统产生最小影响的。这是非常有用的,以确定趋势的执行器扭矩的能力相对于每个变量被改变。
由于前一个序列是迭代的,所以希望减少迭代之间的时间。通常步骤7和步骤11是最复杂和最复杂的步骤。虽然这两个步骤都可以用方程来完成,但使用图形化的方法进行分析往往更快更容易。几何求解器,如CAD程序中的草图工具,很快就可以让一个设置致动器的几何约束,并解决执行器的安装位置(而不是使用公式3.23或公式3.24)。以确定的11步,这是最快的情节Tmax,push和Tmax,pull随着期望的转矩和转角曲线一扭矩角图(图3.7)。使用这两种图形方法可以使设计者快速调整设计参数,生成新的安装点,然后检查这些新安装点是如何调整的执行器的性能。
图3.7:验证执行器功能的示例
3.1.5布利克斯驱动选择
使用第3.1.4方法,执行器安装位置 和布利克斯驱动选择如表3.2所示。执行器的模型在第3.2的图3.23节中。
表3.2:BLEE驱动器的选择与安装
图3.8 -图3.10显示了最大扭矩和角度图(从公式3.1)。和公式3.2)对布利克斯驱动相比于踝关节、膝关节和髋关节的CGA数据,在平地行走时,所有所需的扭矩/角度曲线都在执行机构的能力(加上安全系数),因此执行机构可以提供行走所需的扭矩。
图3.8:行走时踝力矩与角度驱动设计曲线
图3.9:行走时膝关节力矩的驱动设计曲线
图3.10:步行扭矩与转角驱动设计曲线
图3.11至图3.13显示布利克斯的驱动能力,随着所需的扭矩和角度曲线上升的楼梯的CGA曲线。所需的扭矩/角度曲线仍然落在执行器的能力(加上安全系数),因此,执行机构可以提供爬楼梯所需的力矩。
图3.11:楼梯提升的踝力矩与转角驱动设计曲线
图3.12:楼梯提升扭矩与转角驱动设计曲线
图3.13:楼梯提升扭矩与转角驱动设计曲线
3.1.6驱动实现
在驱动设计的另一个复杂的关节和执行机构的机械布局。经常找到驱动安装位置,以满足扭矩的要求是不够复杂的,但有一个额外的约束,确保致动器不干扰任何机械结构或关节结构/轴承。另外,始终保持连接尽可能紧凑是可取的。一般情况下,在评估可能的关节驱动解决方案时,必须考虑机械设计的限制。
然而,有一个额外的几何自由度不影响驱动能力。只有E21是指定的驱动选择期间,但完全约束的安装位置由theta;1和theta;2 = theta;1 theta;21给定。因此,在不改变驱动力矩能力的情况下,通过只修改theta;1,执行器的安装位置可以围绕关节轴旋转。这通常有助于消除其他理想方案中的小干扰。
3.1.7骨骼驱动的总结
液压驱动的选择和上浆过程是复杂的,主要是由于使用线性致动器产生旋转关节扭矩的几何限制。由于执行器设计的一个重要部分是通过一个迭代的“试错”的基础上最容易进行的,本节介绍了浆纱BLEEX驱动中发现的一般趋势。
踝关节屈曲关节的运动范围大致为零(站立)。踝关节也有相对较低的运动范围相比,其他屈曲关节。因此,踝关节执行
全文共13173字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15331],资料为PDF文档或Word文档,PDF文档可免费转换为Word

