英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
基于卡尔曼滤波的混合传感器在线机器人标定
关键词:
在线机器人校准运动学识别惯性测量单元卡尔曼滤波器
Factored四元数算法
摘 要
本文提出了一种基于惯性测量单元(IMU)和位置传感器的在线机器人自校准方法。 在这种方法中,需要一个位置标记和一个IMU刚性连接到机器人工具上,这使得可以实时从位置传感器获取机械手的位置和IMU的方位。 本文提出了一种有效的方法,该方法结合卡尔曼滤波器(KF)来估计机械手的位置和方向。 使用这些姿态(方位和位置)估计方法将会提高姿态测量的可靠性和准确性。 最后,扩展卡尔曼滤波器(EKF)用于估算运动学参数误差。 与现有的自校准方法相比,这种方法的最大优点是不需要任何复杂的步骤,如相机校准,角点检测和激光跟踪,这使得所提出的机器人校准程序在动态制造环境中具有更大的自主性。 而且,减少复杂的步骤可以提高校准的准确性。 对GOOGOL GRB3016机器人的实验研究表明,该方法具有更好的准确性,方便性和有效性。
关键词:
在线机器人校准运动学识别惯性测量单元卡尔曼滤波器
Factored四元数算法
1.介绍
由于制造和装配公差,机器人的实际运动学参数偏离其名义值,这被称为运动学误差。 如果使用标称运动来估算机器人的姿态,则运动误差会导致机器人工具的误差。 由于成本的限制,运动学标定是提高机器人绝对精度的有效途径目前,校准任务使用许多测量技术,如坐标测量机,激光跟踪干涉仪系统以及便宜的定制夹具。这些系统不仅非常昂贵,而且不便于使用或工作量小。在动态环境中使用的系统预计将执行校准,而不需要任何外部昂贵的校准装置和精心设置,这意味着自校准。
自我校准技术可以分为两种:
(1)冗余传感器方法和
(2)运动约束方法。
对于并联机构存在一种自标定方法,并对壮族提出的Stewart平台进行了个案研究。他使用六个旋转编码器的正向和反向运动进行参数识别的三个目标函数。
。
Khalil和Besnard除了上面提到的冗余传感器之外,还安装了两个正交配置的测斜仪,以校准Stewart平台。但是,这些方法有一些限制。其中之一是一些运动参数正交不是独立于误差模型,并且平台上的工具的位置或方向不能被校准。
对于另一种方法,即运动约束方法,合成系统的移动性将低于其通过固定一个或多个无源关节或限制操纵器的部分DOF的固有感测度,从而校准算法可以是执行。Park等人降低了串联机械手的工具的可动性,并且通过仅使用机械手中固有的关节传感器来执行自校准。这个想法被用来扩展到用手持式仪表立体相机校准机器人系统。然而,由于移动性限制,平台上的工具的位置和/或定向不能被校准,并且与校准算法相关的一些与被锁定的被动关节相关的参数错误可能变得不可观察。
为了解决这些局限性,机器人校准的进步使得研究人员可以使用手持式摄像头来校准机器人,而不是使用被动关节的测量结果或施加机械约束。 与那些机械测量设备相比,这款相机系统成本更低,使用更方便,更准确。传统的基于视觉的方法 校准机器人需要精确的三维测量结果
参考坐标系和程序不方便,耗时且对某些应用可能不可行。 自校准方法 [8,9] 假定相机刚性连接到机器人工具。 本文提出的闭环方法“虚拟闭合运动链” [10],使用已经在机器人中的关节角度测量值可以被认为是自校准的。 一种方法使用激光捕捉机器人位置数据来模拟机械手的刚度 [11] 并预测运动学参数 [12]。 O#39;Brien等人 [13] 使用磁场运动捕捉机器人数据来估计运动参数。 Du et al。 [14] 使用两个姿态传感器来校准参数。 但是,粒子过滤是无效的。 Rauf等人 [15] 分别使用基于视觉的测量装置和姿态测量装置进行运动学校准。 Du et al。 [16] 采用连续数据捕获方法,通过使用相机来估计运动参数。 但是,这些方法有一个局限性,即校准是离线完成的。 优化技术基于测量的工具位置。 测量位置的参数误差被最小化,但误差在非常不同的位置增加。 而且,机器人承受不同的负载时参数错误增加。 当机器人在深海或外太空等高温或高压环境中使用时,机器人连杆的形状很容易改变。 因此,在线校准是纠正运动参数不可缺少的方法。
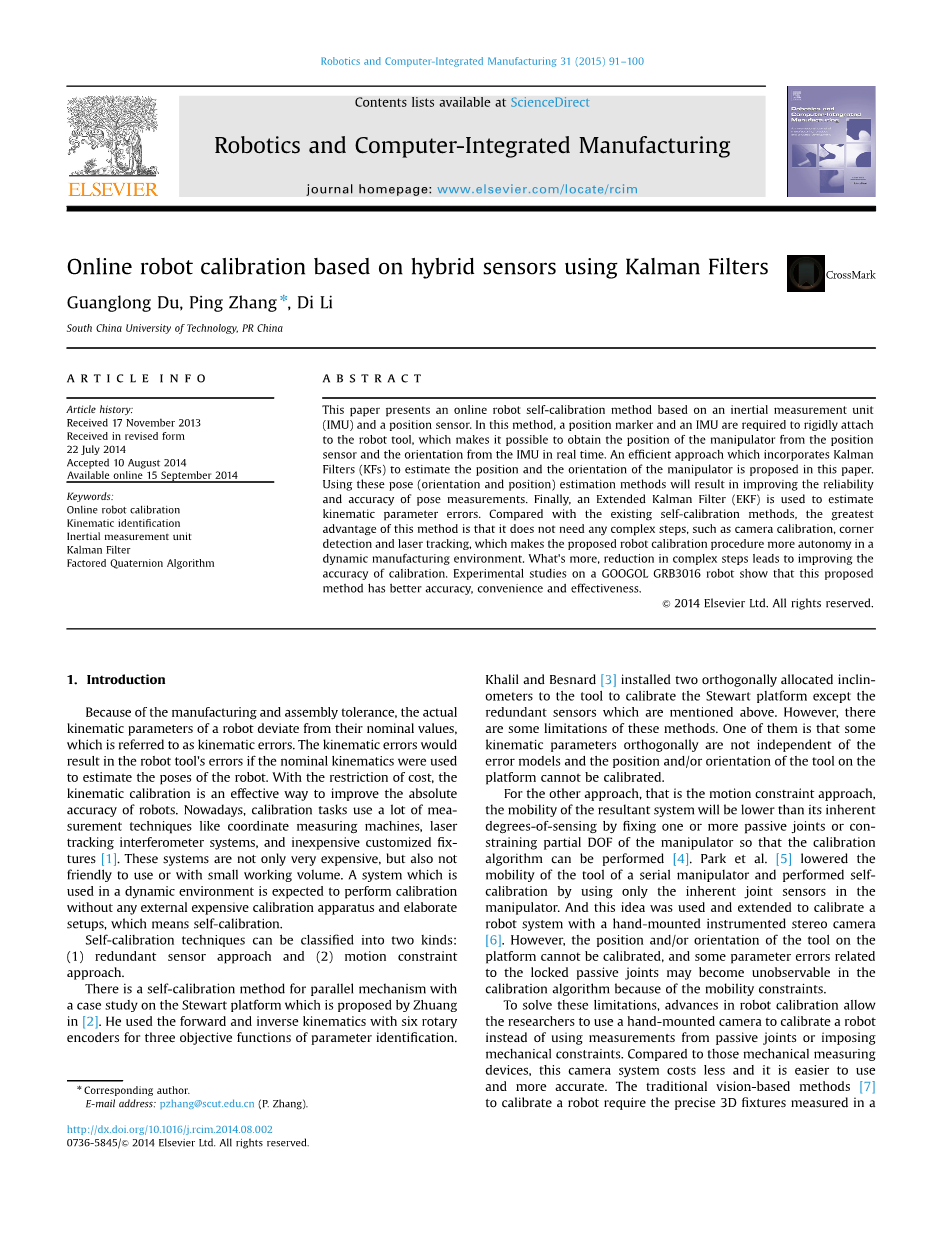
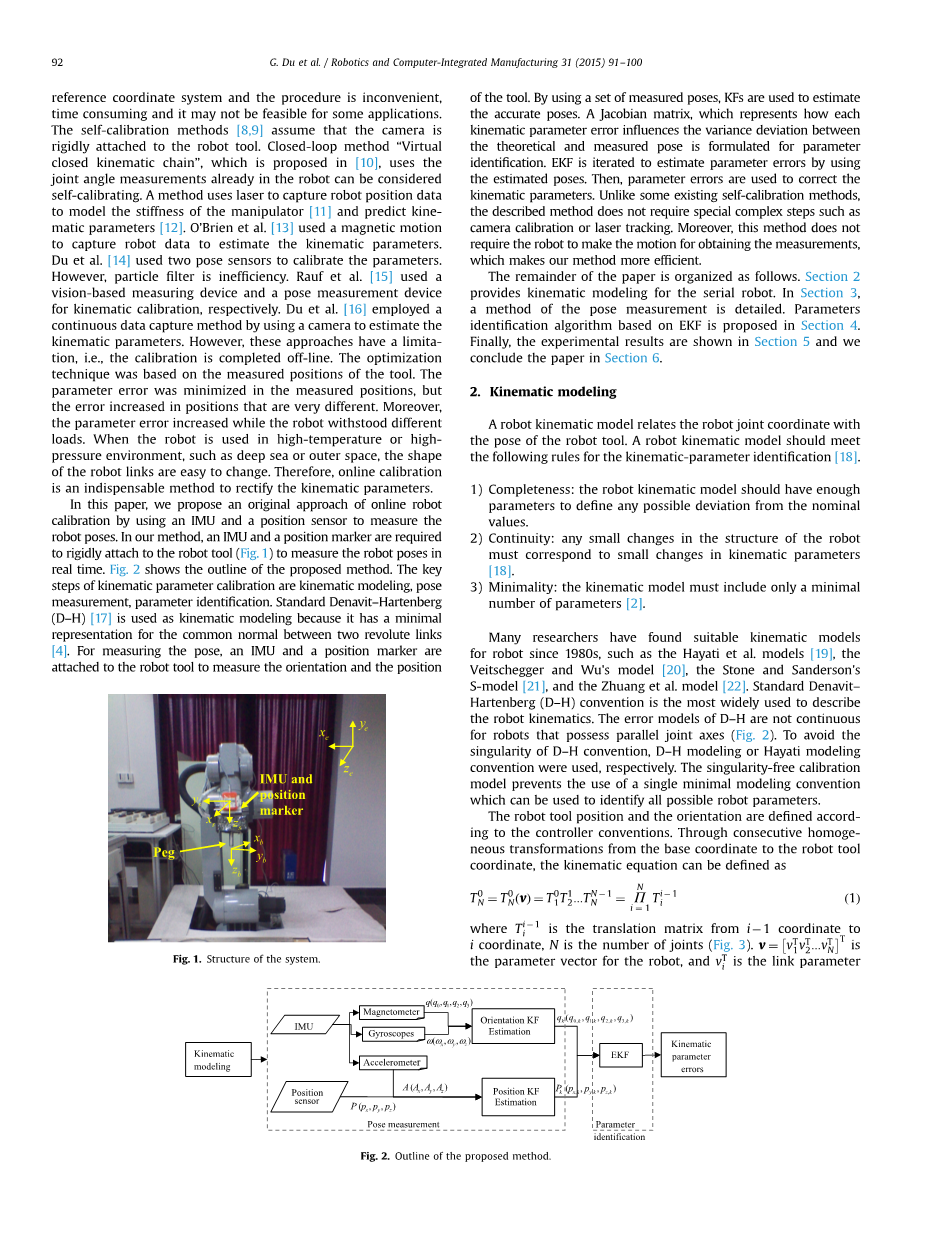
在本文中,我们通过使用IMU和位置传感器来测量机器人姿态,提出了一种在线机器人校准的原始方法。 在我们的方法中,需要一个IMU和一个位置标记来刚性地连接到机器人工具上图。1)来实时测量机器人姿态。 图2 显示了该方法的概要。 运动学参数标定的关键步骤是运动学建模,姿态测量和参数识别。 标准Denavit-Hartenberg(D-H) [17] 被用作运动学建模,因为它对两个旋转链接之间的公共法线具有最小的表示 [4]。 为了测量姿态,在机器人工具上附加IMU和位置标记以测量方向和位置
的工具。 通过使用一组测量的姿势,KF被用来估计精确的姿势。 表示每个运动参数误差如何影响理论和测量姿态之间的方差偏差的雅可比矩阵,用于参数识别。 通过使用估计的姿势来迭代EKF以估计参数误差。 然后,使用参数错误来校正运动参数。 与一些现有的自校准方法不同,所描述的方法不需要特殊的复杂步骤,例如相机校准或激光跟踪。 此外,这种方法不需要机器人做出运动来获得测量值,这使得我们的方法更有效率。
在本文的其余部分安排如下。 第2节 为串行机器人提供运动学建模。 在 第3节,详细描述姿态测量的方法。 提出了基于EKF的参数识别算法 第4节。 最后,实验结果如图所示 第5节 我们在这篇文章中总结了这篇论文 第6节.
- 运动建模
机器人运动学模型将机器人关节坐标与机器人工具的姿态关联起来。 机器人运动学模型应符合以下运动学参数识别规则 [18].
自20世纪80年代以来,许多研究人员已经找到了合适的机器人运动学模型,如Hayati等人。 楷模 [19],Veitschegger和Wu的模型 [20],Stone和Sanderson的S模型 [21],庄等人。 模型 [22]。 标准Denavit Hartenberg(D-H)惯例是最广泛用于描述机器人运动学的。 对于具有平行关节轴的机器人,D-H的误差模型是不连续的(图2)。 为了避免D-H惯例的奇异性,分别使用D-H建模或Hayati建模惯例。 无奇点校准模型可防止使用可用于识别所有可能的机器人参数的单个最小建模约定。
根据控制器惯例定义机器人工具位置和方向。 通过从基础坐标到机器人工具坐标的连续齐次变换,运动学方程可以定义为
i
联合我的向量,其中包括联合错误
是关节i的标称值向量,是关节i的链路参数误差向量。 确切的运动学方程是
N
1
2
3.2 卡尔曼滤波器
状态估计在KFs中使用测量,系统模型和测量模型分两步进行,即预测和更新 [26]。 对于时变系统和测量模型,状态空间动态方程应被视为
-
- Factored四元数算法(FQA)
基于地球重力和磁场测量的FQA用于估计刚体的方向 [12]。 但是该算法仅适用于静态或慢速刚体。 为了使其适用于相对较大的线性加速度,KF融合算法与角速率信息一起用于估计动态物体(慢速移动或快速移动)在下一节中的方向 [23].
在我们的应用中,使用惯性测量单元的传感器模块被用来确定机器人末端执行器(EE)的方向(滚动,俯仰和偏航)。 IMU传感器由一个三轴加速计,两个双轴陀螺仪和一个三轴磁力计组成。
于三个正交安装的加速度计/磁力计的轴。 因为传感器刚性连接到
线性的,因此使用KF。 然后,改写形式的公式。
其中Phi;k是时间tk-1到时间tk的系统转换矩阵,Gamma;k是时间tk处的输入矩阵,并且Hk是时间t处的测量矩阵k。 具有均值和协方差的后验密度函数(PDF)可以通过KF估计,当系统可以用方程式的形式表示时。 (11)和(12)。 因此,KF的预测和更新步骤如下:
估计的协方差:
方向(滚动,俯仰和偏航)。 定义围绕xe轴的旋转phi;作为滚动,围绕ye轴的旋转theta;和围绕ze轴的旋转psi;作为偏航。 根据欧拉定理 [24] 无限旋转,从欧拉角到四元数的转换是
k
其中wx,wy和wz是角速度的过程噪声。 因为我们使用校准的陀螺仪来测量角速度,所以观测矩阵H是
其中n是角速度矢量的数量,p是四元数。 为了满足 (7),在时间k处确定的四元数应该被归一化
由于加速度测量受重力影响,Z轴平行于重力矢量,所以系统输入矩阵为
我们使用加速度来估计位置状态,所以过程噪声向量是
是刀具加速度的过程噪声。
由于3D摄像机和IMU被校准和初始化,所以用于位置估计的观察矩阵H0是
M
3.3职位KF
在位置估计过程中使用KF来从一组噪声测量值中估计P是哪个位置的状态。 在这个估算中有六个测量值可用
所以这九个州是可观察的。
:IMU在刀架中的三个加速度分量和在局部坐标系中的三个位置分量。从刀架到局部坐标系的方向余弦矩阵MH2S可表示为
可以表示本地框架中工具的加速度
如
确定的位置P时间k处是机器人工具位置的最优值。
- 参数识别
A.差分运动学
运动学识别是通过给出一组姿态测量值和相应的关节角度读数来识别机器人操纵器的运动学模型参数。 运动学识别算法的目标是最小化计算姿态和测量姿态之间的差异。
假设测量姿势的数量是m,可以这样说
其中jglj是局部重力矢量的大小,是工具架中每个轴上的加速度测量部件。 速度分在肩架中的每个轴上可以定义为
fi
是第i个测量姿态的联
全文共8037字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[14853],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

