使用主动轴偏转的磁悬浮车轮的主动振动控制外文翻译资料
2022-08-10 20:20:36

英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
使用主动轴偏转的磁悬浮车轮的主动振动控制
摘要:提出了一种基于轴挠度的磁悬浮车轮同步振动主动抑制方法。考虑旋转轴与转子惯性轴的不平行性,建立了MSW系统的精确动力学模型,该模型具有同步扰动。为了减小传递到基座上的同步振动力矩,主动偏转转子轴。根据同步扰动调整参考消隐角,建立了新的跟踪误差动力学模型。然后,将状态反馈方法和干扰观测器相结合,设计了一种复合控制方法。通过李亚普诺夫稳定性证明了扰动观测器和闭环系统的稳定性。通过求解多个线性矩阵不等式,可以得到扰动观测器和状态反馈控制器的参数。分析了该方法减振的可行性。最后,进行了数值模拟和实验。结果表明,该方法可以有效地降低MSW的同步振动力矩。
关键词:主动振动控制、复合控制、干扰观测器、磁悬浮车轮。
引言
卫星姿态的高精度和高稳定性是使地球观测和深空探测卫星进行高分辨率观测的关键[1]-[4]。
反作用轮是航天器姿态控制中常用的执行元件。影响点位精度的扰动是由多个源产生的。反作用轮是最大的扰动源之一。文[5]分析了反作用轮对卫星的影响。为了估算影响航天器的飞轮振动扰动,许多研究人员试图建立一个精确的干扰模型[6]。对车轮扰动进行精确建模是困难的。由于振动扰动随着车轮转速的增加而增加,为了提高姿态稳定性,车轮被限制在低速区域内[7]。基于对车轮的扰动分析,隔振可以用来减少扰动源的影响[8]。隔振是一种在弹性悬挂子系统的基础上滤除高频干扰的方法。该方法能够消除频率高于弹性悬架子系统截止频率的振动。通过主动控制的弹性悬挂子系统,振动可以主动衰减[10]。磁悬浮轮(MSW)是一种使用非接触式磁轴承(MBs)的轮子。由于它们具有无摩擦操作、振动小、精度高等优点,可以满足航天器长寿命、高精度、高稳定性的要求,许多研究人员已经证明,MSW振动扰动可以通过主动控制的MBs[13][14]有效地衰减。
转子不平衡引起的振动扰动是一种频率等于转子旋转频率的同步振动。由于转子制造精度的限制,转子不平衡是旋转机械的一个固有特征。这种动态不平衡可归因于转子的惯性轴和几何轴之间的不重合。这种非重合可分为两种类型:两个轴的非平行性和两个轴的非重合而平行性。同步振动力矩是由第一种不平衡引起的,而同步振动力是由第二种不平衡引起的。从理论上讲,如果制造工艺保证了惯性轴与几何轴的重合,则不存在同步振动。然而,在MSW情况下,由于旋转轴线与转子几何轴线不完全重合,存在同步振动。这种振动可以通过主动控制MBs而减弱。Knospe等人实验性地测试了许多振动衰减算法[13]。这些算法是开环算法。理想情况下,振动可以通过开环方法与预调度轴承力有效衰减。如果预定的力量是准确的,可以实现近乎完美的减缓和主控制器的稳定性保持不变。然而,开环方法依赖于预计算程序的准确性,这给它们在转子振动问题上的应用带来了严重的限制。相比之下,闭环方法对于大多数系统来说更为可行。Behal等人设计了一种自适应方法来补偿未知的正弦扰动,他们使用自适应律在线估计频率和控制器参数[15]。这种方法表明未知扰动频率是逐渐变化的。通常,MSW系统的同步噪声频率是可以测量的。蒋和朱提出了一种基于有限持续时间脉冲响应滤波器的自适应方法来抑制有源磁悬浮轴承系统的多频率周期振动。这种方法是一种直接的方法,可以有效地降低同步噪声。然而,它的计算复杂度极高。蒋和朱根据转子不平衡质量的位置实现了不平衡补偿,从而避免了随转子转速的变化而重新计算[17]。
前馈控制是减轻扰动的常用方法。石等人设计了一种前馈方法,在MB反馈控制回路的求和结点注入一个同步信号,并调整其振幅和相位来微小化振动[18]。基于陷波滤波器的方法通常用于磁悬浮轴承系统的有源振动控制。Dever等人使用了一个陷波滤波器为基础的前馈方法来补偿转子不平衡[19]。采用移动陷波器对同步噪声和谐波噪声进行处理。然而,前馈系数的确定比较困难。在[19]的系数是实验和手动调整,以优化位置的准确性。方等人提出了一种自适应的方法来调整前馈系数的基础上的条件,完全抑制不平衡振动[20]。该方法的精度依赖于动态模型和放大器的准确性,并以一个恒定的频率为基础。郑等人设计了一个平行模式陷波器,以实现更大的陷波深度和更快的收敛速度,而相移陷波器用于保持稳定的速度范围广泛[21]。Liu和Liu设计了一种基于滑模观测器的自适应补偿方法,以提高考虑滑模观测器参数摄动时的自平衡性能。
干扰观测器方法是另一种广泛应用的干扰抑制方法。陈等人使用力观测器来估计干扰力,并结合自校正模糊pid型控制方法来处理不平衡振动[23]。Schuhmann等人采用了前向卡尔曼滤波器和最优状态反馈调节器来提高定位精度,其中扩展卡尔曼滤波器用于估计引起不平衡的干扰[24]。Grochmal和Lynch提出了一个扰动观测器来估计同步振动和一个快速收敛观测器来降低扰动观测器的阶数[25]。
现有的主动振动控制直接将设计好的同步信号发射到主动磁轴承系统中。很难不仅确定设计的同步信号[18]-[20]的系数,而且在很大的速度范围内保持稳定。由于MSW在很大范围内变化转速,这些方法的性能将受到影响。此外,注入的同步信号所产生的偏转角度事先并不知道。现有的方法表现不理想的表现为新的MSW在[26]和[27]。基于上述因素,本文重点研究了MSW同步振动转矩控制器的主动轴挠度控制器设计。基于干扰观测器的原理,提出了一种降低MSW基座同步振动转矩的方法。考虑转子惯性轴与旋转轴的不平行性,建立了MB系统的精确动力学模型。利用该精确模型对同步振动转矩进行了模拟计算。此外,为了减小振动力矩,转子轴主动偏转。通过引入转子轴偏转角参考值,建立了混合扰动下多轴联动系统的跟踪误差模型。基于系统的跟踪误差模型和干扰模型,提出了一种将观测器和状态反馈相结合的混合方法。证明了闭环系统在任意非零转速下的稳定性。通过对稳态磁力矩的分析,精确设定基准偏转角,使传递给基座的振动力矩最小。
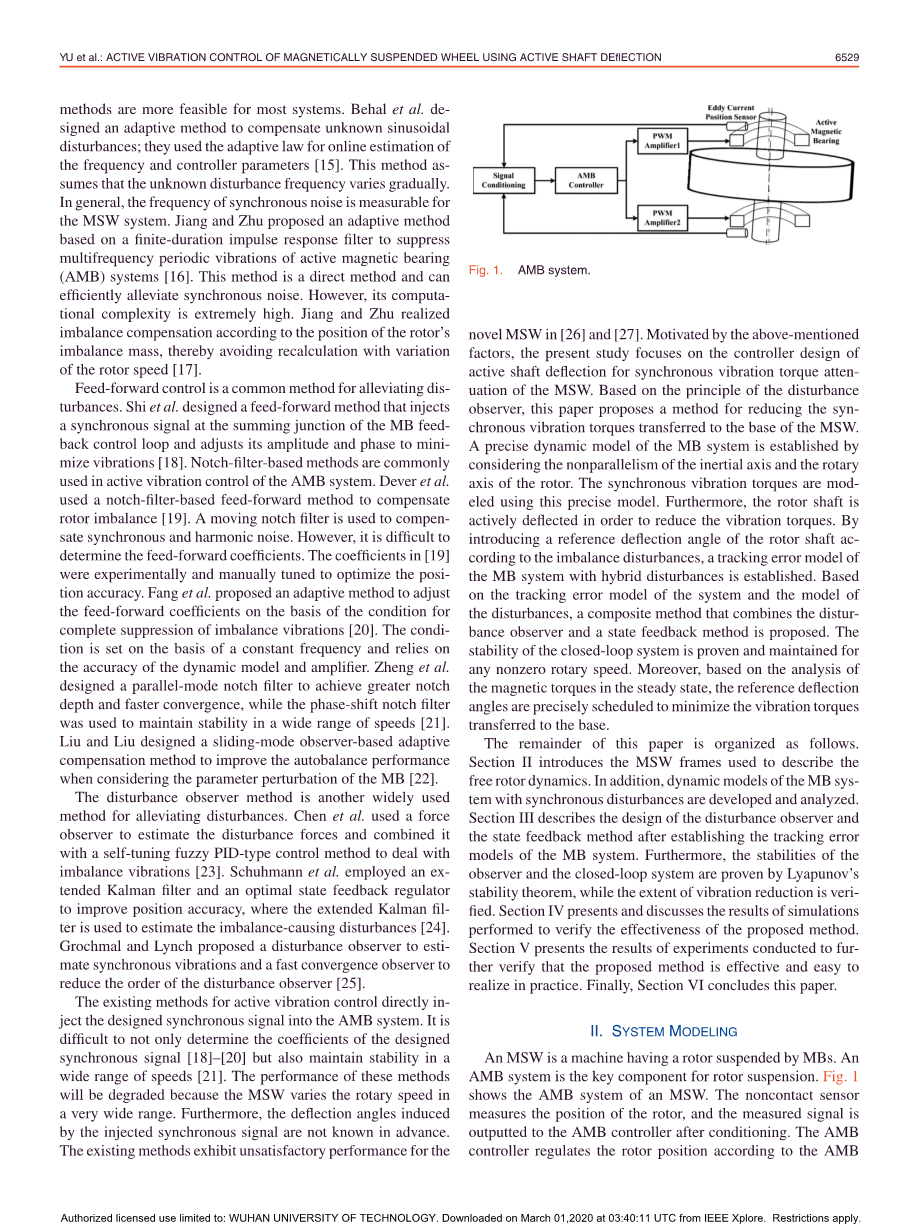
图一 磁悬浮轴承系统
本文的其余部分组织如下。第二部分介绍了描述自由转子动力学的MSW框架。此外,还建立并分析了同步扰动下磁悬浮系统的动力学模型。第三节在建立了MB系统的跟踪误差模型后,给出了干扰观测器的设计和状态反馈方法。利用李亚普诺夫稳定性定理证明了观测器和闭环系统的稳定性,并验证了系统的减振程度。第四节介绍和讨论了仿真结果,以验证所提出的方法的有效性。第五节给出了实验结果,进一步验证了该方法的有效性和实用性。最后,第六节对本文进行了总结。
一、系统建模
Msw是一种由MBs悬挂转子的机器。磁悬浮轴承系统是转子悬架的关键部件。图1示出了MSW的磁悬浮轴承系统。非接触式传感器测量转子的位置,经调节后将测量信号输出到磁悬浮轴承控制器。电磁轴承控制器根据电磁轴承调节转子位置执行机构。电磁轴承对象模型主要包括自由转子和电磁轴承执行器的动力学模型。
不平衡振动力矩可以归结为转子的惯性轴和转子的旋转轴之间的不平衡。为了建立这种振动扰动的数学模型,首先定义了电磁轴承和转子的多个框架。
框架定义
建立磁悬浮轴承系统的精确模型需要五个框架。磁悬浮轴承和转子的框架如图2所示。
图2 磁悬浮轴承系统的框架
Amb的几何坐标系:AMB的几何坐标系被定义为oxsyszs(简称s)。原点为连接上下轴承中心线的中点,z轴位于两个轴承的中心线上,x轴和y轴都垂直于z轴。
(1)转子坐标系(oxbybzb):转子的坐标系被定义为oxbybzb(简称b)。原点是转子的几何中心。Zb轴位于转子轴的对称轴上。轴和yb轴垂直于zb-轴,平行于转子盘面的平面上。此外,b固定在定子上,并且不随转子旋转。当平移角和偏转角是理想的零时,b和s是重合的。
(2)转子的几何坐标系(oxryrzr):转子的几何坐标系定义为oxryrzr(简称r)。原点是转子的几何中心。Zr轴位于转子轴的对称轴上。Xr轴和yr轴垂直于zr轴,平行于转子盘面的平面上。此外,r固定在转子上,并以旋转速度转动。
(3)转子惯性坐标系(oxtytzt):转子的惯性坐标系定义为oxtytzt(简称t)。原点是转子的质心。Xt-、yt-和zt-轴位于主惯性轴方向。T和r之间的转移角可以设置为常数。
(4)赤道惯性坐标系(oxiyizi):赤道惯性坐标系被定义为oxiyizi(简称i)。它的起源与地心重合,而西轴则沿着赤道面和黄道平面的交点朝向春分点。子轴朝向北极,而二轴位于赤道面,垂直于十一轴。
二、动态模型
为了便于动力学方程的建模,定义了许多统一的表示形式。
(1)R3中的矢量Vn是在框架n中指定的三维矢量v。
(2)R3中的矢量vnm是框架m相对于框架n的三维矢量v。
(3)R3中的矩阵Cnm是从框架n到框架m的传递矩阵。
(4)在R3中向量v的R3X3中的反对称矩阵算符v表示向量v和任何其他向量之间的矢量叉积运算;因此,方程式vxy=vtimes;y是对任何V,y isin; R3向量建立的。
在上述表示中,框架m和n可以设置为任何先前定义的框架,即i、s、b、r和t。
根据角动量定理,给出了自由刚性转子的动力学方程
其中omega;itt是转子的转速,Tt是作用在转子上的扭矩。惯性张量矩阵jisin;R3X3是一个对角矩阵,其主要元素为惯性矩jr1、jr2和Ja,其中Ja为转子的极性惯量,jr1和jr2为转子的侧向惯量。
在框架r中,(1)变为
设[rt,rt,rt]为框架r与框架t之间的三个欧拉角,通过选择一个合适的框架r,第三个欧拉角rt可以精确地等于零。此外,ϕrt和theta;rt表示zr轴和zt轴之间的相对角度,这是转子不平衡的根源。一般来说,ϕrt和theta;rt非常小,因此,通过忽略小的二阶元素,J1等价于下面的表达式:
在框架b中,(2)成为
其中,根据框架的定义,框架b和框架r之间的角定义为[0,0,ϕbr],假设转子盘是轴向对称的,J2等效于以下表达式:
由于地球自转的速度极低,因此近似omega;basymp;0是合理的。 假设转速Omega;恒定,则挠度动力学方程可以被表示为
其中Tb1和Tb2是MB提供的扭矩,而omega;bsr1和omega;bsr2是绕xb轴和yb轴的偏转速度。 与常用的相比偏转动力学模型,附加扭矩T23(Omega;)2存在-T13(Omega;)2.(6)中的等效惯性矩阵J2的元素可以重写为:
其中psi;br0是介于之间的第三个欧拉角的初始值框架b和框架r,而gamma;rt = arctan(ϕr ttheta;rt)。公式(6)和(7)表明,附加转矩存在于两个横向轴上。 如果欧拉角ϕr t和theta;rt为零,则附加扭矩等于零。 此外,附加扭矩与转速Omega;同步,而其幅度与Omega;以及欧拉角ϕr t和theta;rt有关。 不仅要预先确定ϕr t和theta;rt,而且要预先确定附加转矩psi;br0 gamma;rt的初始相位。 在这项工作中,附加转矩被视为同步扰动Td,其定义为
对于城市固体废弃物,转速是可测量的,易于确定。 如果幅度和相位可以被精确地预定,则同步干扰Td可以被精确地获得并且易于补偿。AMB的磁转矩通常被线性化,并且他们的模型由
其中theta;sr1和theta;sr2分别是绕xb轴和yb轴的偏转角。 此外,i1和i2是MB线圈电流,ks1和ks2是偏转角刚度系数,ki1和ki2是电流刚度系数。 等式(9)可以
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[237835],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


