磁流变阻尼系统在建筑中的半主动非线性控制外文翻译资料
2022-08-11 14:56:08
英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
目录
摘要 1
1.绪论 1
2. 磁流变阻尼器 1
3.结构控制 4
3.1. 框架设计 4
3.1.1. Takagi-Sugeno模糊模型 4
3.1.2. 并行分布补偿(PDC) 5
3.1.3. 线性矩阵不等式(LMIs) 6
3.2. 基于线性矩阵不等式(LMI)非线性控制系统设计的公式化 7
3.2.1. 稳定性条件 7
3.2.2. 线性矩阵不等式(LMI)稳定控制的公式化 9
3.2.3. 线性矩阵不等式极点配置控制的公式化 10
3.3. 基于输出反馈的半主动非线性模糊控制 12
3.3.1. 状态估算器 12
3.3.2. 限幅算法 13
4.数字化示例 14
4.1. 控制性能评估:正常情况 17
4.2. 控制性能评估:剧烈噪声 21
5.结论 24
摘要
本文提出了一种为在建筑中的磁流变阻尼系统以线性矩阵不等式为基础的系统的设计方法。本方法考虑了一个统一系统的稳定性和瞬态特征。首先,多重基于Lyapunov的控制器通过线性矩阵不等式设计从而保证建筑结构的全局渐进稳定性和瞬态相应的表现。基于Lyapunov的反馈控制器被一组Kalman估计量转化为输出反馈,然后这些基于Lyapunov的控制器和Kalman读取器由模糊逻辑整合进一个全局非线性控制系统。 为论证该方案的有效性,研究了了一个装备有磁流变阻尼系统三层建筑结构。将该非线性控制系统的表现与传统线性最优控制器(线性二次高斯LQG)比较,未控制下的系统反馈作为基线。比较未控制的和半主动控制的反馈,推论出本非线性控制系统应用在装配有磁流变阻尼系统的结构中可以起到减少震动的作用。此外,该系统比线性二次高斯法(LQG)在减缓反馈方面更为有效。
关键词:线性矩阵不等式(LMIs)、非线性控制、基于Lyapunov的多重控制器、磁流变阻尼器
Abstract
This paper proposes a linear matrix inequality (LMI)-based systematic design methodology for nonlinear control of building structures equipped with a magnetorheological (MR) damper. This approach considers stability performance as well as transient characteristics in a unified framework. First, multiple Lyapunov-based controllers are designed via LMIs such that global asymptotical stability of the building structure is guaranteed and the performance on transient responses is also satisfied. Such Lyapunov-based state feedback controllers are converted into output feedback regulators using a set of Kalman estimators. Then, these Lyapunov-based controllers and Kalman observers are integrated into a global nonlinear control system via fuzzy logic. To demonstrate the effectiveness of the proposed approach, a three-story building structure employing an MR damper is studied. The performance of the nonlinear control system is compared with that of a traditional linear optimal controller, i.e., H2/linear quadratic Gaussian (LQG), while the uncontrolled system response is used as the baseline. It is demonstrated from comparison of the uncontrolled and semiactive controlled responses that the proposed nonlinear control system design framework is effective in reducing the vibration of a seismically excited building structure equipped with an MR damper. Furthermore, the newly developed controller is more effective in mitigating responses of the structure than the H2/LQG controller.
Keywords: Linear matrix inequalities (LMIs), Nonlinear control, Multiple Lyapunov-based controllers, Magnetorheological (MR) damper
1.绪论
近年来,模糊逻辑在控制系统设计领域吸引了很多目光,大量的模糊逻辑控制器设计方法被应用到了许多大型城市建筑结构中。它们包含了基于试错法的途径,自组织法,运用线性二次高斯数据,基于神经网络的尝试,自适应的模糊控制,基于遗传算法的尝试和模糊滑动模态等等。 然而,用于装备有非线性半主动控制设备的建筑结构的半主动非线性模糊控制器(ANFC)的系统性的设计框架还未被提出。
从实用性的观点来看,对于缓和例如地震和强风等自然灾害的大型建筑控制系统,关于系统性设计框架的研究仍被需要。一个主动非线性模糊控制(ANFC)系统的设计可以通过并行分布补偿(PDC)的方式系统化地得出,这种方式使用的多个线性控制器相当于在模糊规则下有自动时序规划的局域线性架构模型。Tanaka和Sano提出了一个使用Lyapunov法分析主动非线性模糊控制的理论。该理论通过寻找一个共通的正定矩阵来满足让一个主动非线性模糊控制系统全局上趋于稳定的条件,从而满足一系列 Lyapunov联立不等式。
然而,基于并行分布补偿法(PDC),目前还没有针对半主动非线性模糊控制(SNFC)应用于装备有用来承受例如地震和强风的破坏性环境力的半主动设备的建筑结构以控制震动的系统的设计框架。首先,建立了一个磁流变阻尼器的数学模型,然后展现了一个非线性控制系统的设计框架和其数字化仿真。
2. 磁流变阻尼器
近年来,智能结构被许多工程领域采用因为其在没有巨大提升结构质量和没有高控制成本的条件下可以显著提升结构系统的表现。 他们被叫做智能结构,适应化结构,主动结构和电适应性和电结构性等等技术。这些技术涉及到制动器、感应器、控制单元、和信号处理单元与结构系统结合而成的智能结构。构成智能结构的主要材料有:压电材料、形状记忆合金、电致伸缩和磁致伸缩材料、聚合物凝胶等等。
半主动设备应用在大型城市建筑结构中,半主动控制策略结合了主动控制和被动控制的优点。半主动控制设备包括例如可变节流孔阻尼器、变刚度设备、变摩擦阻尼器、可控液阻尼器、形状记忆合金制动器、压电材料等等。在其中,由Lord Corporation制造的磁流变阻尼器作为一种可控流阻尼器因其具备的优良特性备受关注。
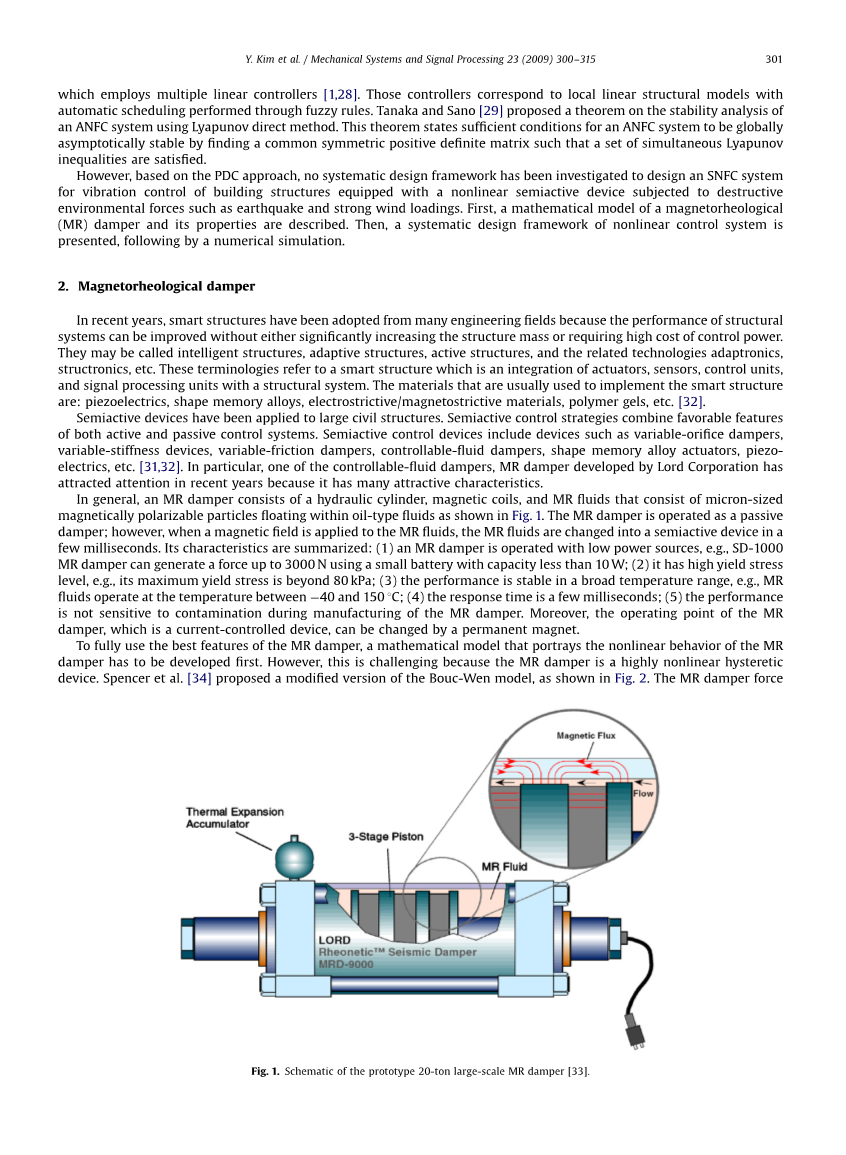
通常,一个磁流变阻尼器由液压缸,磁
线圈、和由微米级可磁极化粒子浮动于油类液体中构成的磁流变液(见图1)构成。磁流变阻尼器运作类似于被动阻尼器,然而,当一个磁场被施加在磁流变液上时,磁流变液会在几毫秒内转化为半主动设备。它的特性总结如下:(1)磁流变阻尼器在低功率下工作,例如SD-1000 MR阻尼器可以用小于10w的电池产生高达3000N的力;(2)屈服应力高,例如它的最高屈服应力达到了80Kpa;(3)它在一个广温度变化区间表现稳定,例如磁流变液在40到150摄氏度间可以工作;(4)它的响应时间仅为几毫秒;(5)它的表现不易被生产时产生的杂质影响。此外,磁流变阻尼器中的电流控制的设备还能被永磁体代替。
图1 20吨大型磁流变阻尼器原型原理图
为了使磁流变阻尼器的特性得到最大化的利用,一个描述磁流变阻尼器非线性行为的数学模型需要被首先建立。然而这是一个挑战,因为磁流变阻尼器是一个高度非线性滞后的设备。Spencer 等人提出了一个改进版本的Bouc-Wen模型(见图2)。根据Spencer等,由Bouc-Wen模型预测的磁流变阻尼器力可由一下微分方程推导出。
这里和被称作进化变量,描述磁流变阻尼器的滞后反应;是高速下的粘滞阻尼参数;是低速时的粘滞阻尼参数;和 都是代表磁流变阻尼器产生的力对电磁驱动器两端电压的依赖性的参数;控制在高速下的刚度;代表蓄电刚度;是刚度为的弹簧的初始位移;和 是磁滞回线的可调形状参数,即卸载的线性和在停止前和停止后区域间的转化;分别是一阶滤波器的输入和输出电压;是该一阶滤波器的时间常数。需要注意的是,非线性现象会在高度非线性的磁流变阻尼器为了减少能量耗散应用在结构系统时发生。这样的集成结构和磁流变阻尼器系统表现为非线性,即使该结构本身常被假设为线性。在下文中,一个新型的为磁流变阻尼器设计非线性控制律的方法将会被提到。
图2 改良Bouc-Wen磁流变阻尼器模型
3.结构控制
3.1. 框架设计
Takagi–Sugeno(TS)模糊模型,并行分布补偿(PDC)和线性矩阵不等式(LMI) 是半主动非线性模糊控制系统的基础。本节中,将以状态空间方程简略的呈现Takagi–Sugeno(TS)模糊模型。并讨论PDC和线性矩阵不等式(LMI)的基本原理。
3.1.1. Takagi-Sugeno模糊模型
1985年,Takagi和Sugeno提出了一种通过在模糊模型的推断部分引入线性等式的方式以建模复杂非线性动态系统的有效方法,这种方法被称作Takagi–Sugeno模糊模型。它因其不再需要去模糊化而使计算成本得以减少。此外,Takagi–Sugeno模糊模型的另一重要价值是,它可以提供一个为严格数学分析的框架,即许多现代线性系统理论可以被应用到非线性系统模型中得益于IF-THEN的规则。一个Takagi–Sugeno模型典型的模糊规则形式如下:
这里指集中于第j个操作点的模糊集,是可为输入或输出值的前提变量。推断部分的等式可以是任何线性等式。然而,用状态空间方程的形式来代表推断部分会更有利;一个Takagi–Sugeno模糊模型的典型规则用状态空间方程在推断部分表示形式如下:
这里指模糊规则的数目,指前提变量的数目,指状态向量,指输入向量,指输出向量,是系统矩阵。注意,等式(9)代表非线性动态系统中的第n个局部线性子系统,即一个线性动态系统模型在有限的区间内执行。因此,所有的局部子系统通过协调每个局部系统的执行区间被整合成一个全局非线性动态系统。这种协调通过在所有的局部子系统模型间差值来执行。需要注意的是,局部子系统的规则只涉及输入输出向量的线性结合;但整合成的子系统却是非线性的。被协调过的Takagi–Sugeno模糊模型形式如下:
这里,是在下的成员等级。
为控制协调Takagi–Sugeno模糊模型的响应,设计了一个与等式(10)相关的控制法则,即。本研究设计了与每个局部子系统相关的多重线性控制器,然后通过模糊插值法将其协调。
3.1.2. 并行分布补偿(PDC)
非线性反馈控制的系统化设计过程因其复杂程度仍具有挑战性。所以,一个重要的问题是线性系统的理论是否能被应用到非线性控制系统
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[237083],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


