影响H型门式起重机承载结构 动力特性的参数外文翻译资料
2022-05-19 22:37:00

英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
影响H型门式起重机承载结构
动力特性的参数
Rade Vasiljević1,* – Milomir Gascaron;ić2 – Mile Savković2
塞尔维亚高等职业技术学院
德国机械和土木工程学院德国克拉古耶夫茨大学
摘要:本文研究了影响H型门式起重机承载结构动力特性的参数的问题。具有高承载能力的门式起重机,由起重机的运动和负载摆动引起。本文的介绍强调了结构动力学问题的重要性。根据给定的问题,动态空间模型的吊杆和起重机的门已经形成并解决了。本文的主要部分给出了模态分析并确定了动态响应。空间结构采用有限元法和直接积分法。通过速度和加速度变化的影响,对结构的动态响应进行了分析。同样也通过旋转角度的变化对其动态响应的影响,结构进行了分析。调查结果为门式起重机的设计和延续提供了重要的依据和结论。
关键字:H型门座起重机,旋转臂,动态分析行为,有限元方法,动态响应,激励
强调:
- 门式起重机中激励的定义。
- 门式起重机臂架的动态模型。
- H型门式起重机承载结构的有限元模型。
- 承载结构对激励的动态响应。
引言:
结构的动态特性的研究是建立在机械和土木专业上的。各种结构的目的都显现在变量中。这些影响都是普遍的(1),哪一个变量只受时间影响或只受动载荷影响,哪些又是在时间和空间(2)上都是可变的(3)。这些对结构的影响是反映在动态位移的发生中,速度和结构的加速上的。
在机械工程中,这个有关起重机工程领域的问题是最重要的。起重机械的代表作之一,它的主题是旋转门座式起重机。这些起重机的臂是连接着门并且是能够360°旋转。这些起重机因其承载能力高所以动力很强并且与其高度相比基数很小。在港口旋转式起重机中,这些影响都是与时间有关的。负载摆动的贡献对起重机的动态加载有重要意义。有关负载摆动的重要性也在文献(1)和(4)中得到了考虑和证实。此外,这个问题的重要性是参考了标准的(5)。
第一篇论文考虑了平面动态模型,门式起重机大多动力学问题在后来发表的论文中得到了很好的解决。而作者的这篇论文发现了一部分有关动态空间模型的论文,这些模式是跟门式旋转起重机的动态特性是有关的。因此,这项研究是确切的,更具体的说,是研究旋转起重机的。首先,一组动态模型处理的问题。考虑了旋转起重机的动态特性[9][10][11]。接下来是一组动态模型。旋转起重机的控制问题[12]和[13]。
在上述几乎所有的文献中(6)到(13),作者模拟了门式旋转起重机的直接或离散型连续模型。Vasiljevićet等人则通过一致质量的应用呈现出了更精确的结果。
这些文件主要是对这一问题的调查。只有门式起重机的动态模型,他们中很少有人研究动态模型考虑到运输结构。
根据这一事实,本文应该有助于了解靠运动和负载的摆动来激发的起重机的承载结构的动态行为。这个问题的解决方法需要适当的梁臂模型和承载结构。门式起重机动态模型建模的方法是将整个门式起重机分为两个子系统,即承载结构和梁。承载结构和梁之间的关系通过减少负荷和载重的影响将其简化成对门户对应点的拓展。门式起重机的承载结构是进行到了建模的。现实中,空间娴熟是具有连续分布质量的系统,而空间模型的承载结构是更复杂的。因为这些原因,持续的分布质量又一致质量代替。因此,系统的质量矩阵是一致的,是在相同的插值基础上制定的用来推导刚度的函数和矩阵。空间线性梁的模型是一种空间梁单元的方法,有两个节点点,每个结点有6个未知数。
对于采用动态模型的门式旋转起重机,振动模型分析是在第一步中进行分析,并且形成了对动态特性了解较好的基础。第二步是动态的,旋转起重机对励磁的响应是确定的。
1.提出问题
振动是由机械的弹性引起的,而承载结构主要是受惯性作用。这些力的行动时间越短,
振荡越不利。
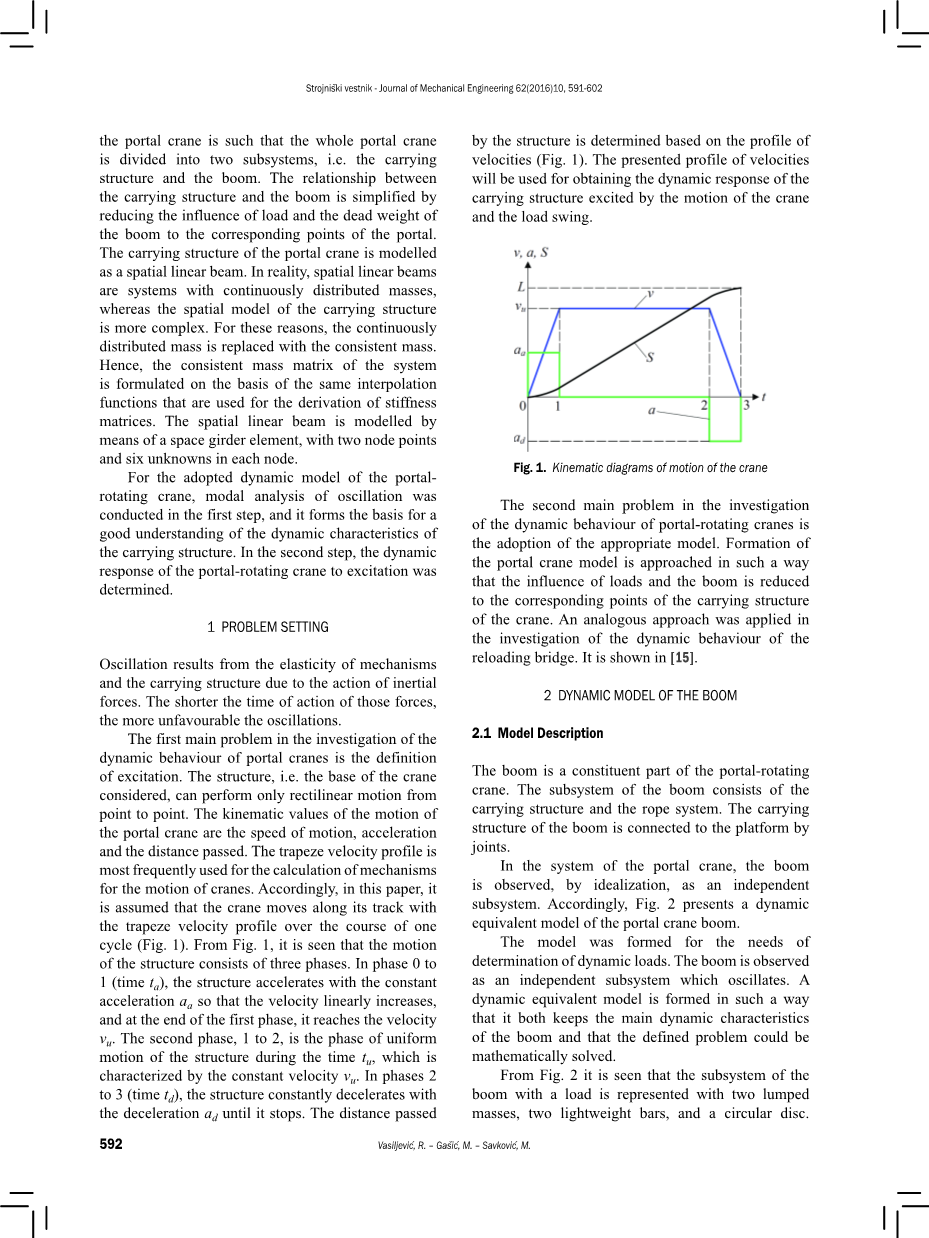
研究的第一个主要问题,定义门户起重机的动态行为。起重机的结构是基础,它的底座只能实现点对点的运动。门式起重机运动的价值是运动的速度,加速度传递的距离。梯形速度剖面是最常用于计算机制,用于起重机的运动。因此,在本文中,它假设起重机沿着它的轨道移动,在一个过程中,梯形速度分布循环(如图1)。从图1可以看出,该结构又三个阶段组成。在0阶段到1阶段(ta),结构随着常数增大而增大,所以在线性加速阶段末尾,速度加速到了vu。在第二阶段,从1到2,是统一的阶段,在tu时间内的运动是以vu匀速运动的。在第二阶段到第三阶段(td),结构不断减速直至为0。
通过的距离根据结构确定速度(图1)。速度的描述将会被用来获得动态响应,由起重机的运动引起的承载结构和负载摆动来决定。
图1 起重机运动图
调查的第二个主要问题,门式旋转起重机的动态特性是采用适当的模型的形成。以这样的方式来处理门户起重机模型,这就降低了载荷和爆炸的影响为承载结构的对应点的起重机。采用了类似的方法。对动态行为的研究重载桥梁,在[15]中显示。
2.梁的动态模型
2.1模型描述
梁是港口旋转的一个组成部分。起重机梁的子系统包括。承载结构和钢丝绳系统。带吊杆的结构与平台相连。
在门式起重机的系统中,梁的被理想化的,是一个独立的子系统。因此,图2是动态的门式起重机吊杆的等效模型。
该模型是为了满足需求而形成的。观察到的梁作为一个独立的子系统振荡,一个动态等值模型是这样形成的。这两者都保持了主要的动态特性。在梁的问题上,定义的问题可能是通过数学上解决。
从图2可以看出,带负载的吊杆用2个块来表示质量,两个轻量的杆,和一个圆盘。对吊杆承载结构的离散化。是在一个轻量的条里进行的。吊杆的绳索系统是用非弹性轻量杆表示。长度r和质量2,允许负载摇摆。它指的是膨胀的尖端,即质量m1和质量m2,由非弹性轻量杆连接的长度r。旋转的列表示。由一个圆盘与轴向转动惯量J。由一个圆盘与轴向转动惯量J,旋转的时刻t,吊杆连接和柱轴是r。
图2 梁的动态模型
根据(15)中的结论我们可以得出以下结论:
其中mb是梁的质量。
2.2数学公式
第二种的拉格朗日方程是用于设置数学公式,形成了梁的动态模型。方程吊杆单元的运动设置基于动态等效模型如图2所示。
系统运动的动力学方程:
theta;是负载的摆动角纵向方向,psi;角振荡负载侧(横向)的方向,phi;角列的旋转。X是直线运动的热潮,omega;是圆形的负载频率振荡。
2.3载荷震荡
负载的非衰减振荡定律在广义坐标下的时间函数,其中theta;和psi;的起重机加速度如图1所示方程式(2a)和(2b)。
在第一步,荷载的运动,即质量m2沿着广义的纵向方向。协调theta;是观察的方式系统外,如图3。
图3 负载的纵向震荡
用于确定负载摆动规律,粒子相对运动微分方程,即质量m2的定义为:
Eq.(3)被投影到轴t和n上,它与质量m2有关。载荷振动规律的细节可以在纵向上得到。因为有这两者之间有一个类比,所以边的方向只有最终形式给出。
纵轴载荷振动规律获得公式:
式(4)中,关系g / Lr代表了象限的圆频率omega;2负载。对于小振荡的情况,近似角theta;很小可以忽略,所以sintheta;asymp;theta;costheta;asymp;1。
Eq.(5)可以通过拉普拉斯变换得到。在第一步,它是这样确定:
从图1的运动学图中可以看出。加速度图特别适合解决Eq.(6)
图4 加速度关系图
现在,根据时间加速度变化的关系图4,拉普拉斯域的加速度可以表示为以下形式:
h是输入加速度的振幅,ti是加速度对应的步长。可以从图6得到:
最后,给出了载荷振荡的规律。通过改变Eq,得到纵向的方向。公式(8)theta;(s)在时域采用逆拉普拉斯变换。
、
得到的载荷振动定律(Eqs)。(9)(10))表示带有a的海维赛(step)函数的线性多项式。
载荷的摆动是最重要的。起重机的失稳和倾覆,会使负载振荡的角度达到最高点。这当时间计算的脉冲时发生相互碰撞的阶段。在这种情况下,会产生负载振荡。每一步的加速度都会逐渐增加,并产生最高振幅的负载振荡。
方程式(9)和(10)表示最大角度。当有下列条件时,振荡达到最大:
- Eqs中的每个余弦函数。(9)和(10)相等,
- 在Eqs中乘以cos。(9)(10)由函数的相应步骤。亥维赛结果得到了这个值。等于1
Eqs中的cos函数。(9)和(10)在相位时,加速度图的四个步骤是由他们的建设性的添加完成时间。在最坏的情况下,是振荡的角度四倍于振荡。由输入加速度的一个步骤引起的纵向上的最大载荷摆动角度。侧方向等于:
为了产生最大的负载摆动是必要的。使加速步骤完全处于阶段,即它有必要满足两个条件:
第一个条件要求时间间隔在第一步和第二步之间,以及在第三和第四之间应该是相等的,即一个振荡周期tau;的一半:
因此,时间延迟等效于相位延迟的激发pi;根据函数的迹象,相反排除阶段变化的可能性。
第二个条件要求时间间隔在第二和第三个脉冲之间。必须包含多个周期tau;的时间延迟:
换句话说,这是成立的因为第二步和第三步有相同的符号所以第二步的变化要求第二步和第三步应该是相同的。
2.4门座的动态负载
根据所采用的振型动态模型振动的广义坐标,弯曲的动态弯矩有两个方向:纵向和横向方向。
纵向弯曲的动态弯矩如图2所示:
侧方向弯曲的动态弯矩如图2所示:
- 结构有限元模型
3.1模型描述
整个旋转起重机被分为两个子系统:移动结构和吊杆。结构与梁之间的关系简化了,在这种情况下,荷载的影响和吊杆的重量都降低到吊杆上部和下部的支撑点。
H型门式起重机的承载结构如图5所示:
图5 H型起重机的承载结构
图6 H型结构的有限元模型
承载结构是刚性空间框架。其基本尺寸Ltimes;B。承载结构的主要结构部分为腿、斜柱、下部和上横梁。腿是一样的(高度H)和站在同一水平。斜柱是相同的(长度C),它们连接到腿和上横梁。上横梁和下横梁之间的距离等于H0。上部梁具有吊杆上部支撑的功能,它由直径为d的圆形圆环构成,下部梁具有吊杆下部支撑的功能,由H型框架构成。
所考虑的门式起重机结构的有限元模型如图6所示。
考虑到悬臂梁绕轴旋转,可以得出假设的平面模型不足以描述所考虑的转旋起重机的动力特性。根据悬臂梁的空间动力学模型,建立了门式起重机的空间模型,使其动态负荷减小。
主要承载结构的力学特性,即形成空间的所有有限元素模型的弹性模量E,G滑动模块,和密度rho;。
动态时间方程式(14)和(15),在上部梁的有限单元和下梁的中心节点的节点上,将水平动态力Pl(t)和Ps(t)组合在一起。这些力量的位置相对于纵向方向(X轴)是定义的角phi;,代表繁荣的角度旋转。
动态力量Pl(t)和4times;Pl(t)/ 4的组合力量反对推翻在纵向方向上的动态力矩Mdyn,平台的原因,即旋转起重机的一部分:
动态力p(t)和4times;Ps(t)/ 4的组合力量反对的动态力矩的方向Mdyn,的平台
荷载质量m1l的垂直静力Pm1减小到下梁的中心节点(H型框架)。同时,减小的吊杆质量m2的垂直静力Pm2也减小到下梁的中心节点。垂直静力总力Pm在臂架下部支撑的中心节点上的作用等于载荷质量的力和减小的臂架质量的力:
结构模型的特征节点获得结构的动力响应是在弹性支承点处的节点(轮轨接触点)。
3.2数学公式
根据门式起重机的数学模型,动态平衡的微分方程,即承载结构的强迫振动:
- 是系统的质量矩阵,[K]系统的刚度矩阵,{你}加速度向量的广义坐标的承载结构,{你}的位移矢量结构的广义坐标,,{ P(t)}矢量结构的外部负载节点。
- Eq.(19)用于研究起重机的运动对结构的动力响应。它可以分解为主动和惯性力在未知和已知位移方向的平衡条件,从而得到形式:
当水平方向上的支撑物的位移和加速度为0时(Uk = 0, Uk = 0), Eq.(20)得到形式:
通过求解代数方程得到结构的固有频率:
在未知位移方向上,整个系统的质量子矩阵等于门式起重机的承载结构矩阵:
在未知位移的方向上,整个系统的刚度子矩阵包括结构的矩阵和弹性支承的刚度矩阵:
在未知位移的方向上,整个系统外部动力的子矢量等于门式起重机承载结构的外部动力力的子矢量:
外部动态力Pu(t)的子向量可以用以下形式表示:
4.1 励磁
描述了起重机沿轨道的运动情况。通过速度v的图。Vc(t),图
全文共11173字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12061],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


