使用安装在转向架上的传感器了解第三轨电流收集系统的动态特性外文翻译资料
2021-12-16 22:40:31

英语原文共 9 页
使用安装在转向架上的传感器了解第三轨电流收集系统的动态特性
摘要
电气化铁路通过各种电流收集装置从供电系统中收集电力。对于高压交流和直流供电的铁路,通常使用架空供电网和车载受电弓来实现。这种系统能够在一系列条件和速度下运行而且它的动态特性很好理解。低压直流供电铁路(lt;1500 V)使用集电靴作为靴类系统的一部分,并以导电轨的形式铺设在电气化基础设施的侧面。这种系统的动态特性与架空供电网系统一样复杂。这是由于导电轨和轨道系统之间的相互作用,与导电靴组件的动力学相结合,集电靴组件与转向架和轴系统机械连接。该系统还可以收集高电流(lt;2000 A),因此保持有效的电气接触至关重要。集电靴和导电轨之间的接口通过标准和指导方针进行调节。然而,在整个系统的有效管理中存在许多尚未解决的工程挑战。系统的机械设计必须平衡良好疲劳寿命和适当冲击强度的要求。还有其他问题,例如从导电轨表面去除污染物和集电靴的磨损也会对设计产生影响。
本文介绍了一种安装在转向架上的仪表系统的一些实验结果,该系统用于监控在英国铁路系统上运行的靴类组件。结果表明,靴类按照设计指南运行。通过观察到的几个接触损失点,可以估计集电靴和导轨之间的接触力,发现平均接触力随着第三轨道高度变化而变化,但是由于集电靴系统中的滞后,在另外一个高度处发现了广泛分布的力。由于第三个轨道存在不规则和斜坡,会出现发生了大而短暂的力和扭矩。
关键词:集电靴,第三轨,动态特性,电气化基础设施
1.引言
电气化铁路车辆通常从供电系统中收集电力。早期的系统使用带有线路或电车线型系统的低压直流供电基础设施。目前运营的铁路使用一系列电压供电,包括直流电和交流电,并且有各种基础设施和车辆设计可以保证列车连续不断地取电。
低压直流供电系统通常使用车载靴,旨在保持集电靴和导电轨之间的电气接触[1]。如果第三轨道中存在断裂或者导体轨道改变侧面,例如在平交道口和开关和交叉附近工作取电,则车载靴也必须应对坡道。集电靴组件包括铁质的收集器,关于第三轨道集电靴的力和动态特性的实验很少。而有一个例子值得我们注意,这个例子描述了收集运往欧洲之星[2]上使用的鞋类信息的实验结果。
本文考虑使用安装在转向架上的传感器来测量集电靴的轨迹和集电靴施加在导电轨上的作用力。此外,本文描述了如何估算作为靴轨组件的一部分的玻璃纤维绝缘子臂中的扭矩。作为在役状态监测系统的一部分,集电靴的位置,力和扭矩是有用的参数。该系统可以监控车辆和基础设施的状况,因此如果出现意外,可以向维护人员发出警报。集电靴使用弹簧从铁路车辆的转向架或主体向下压。
2.实验工作
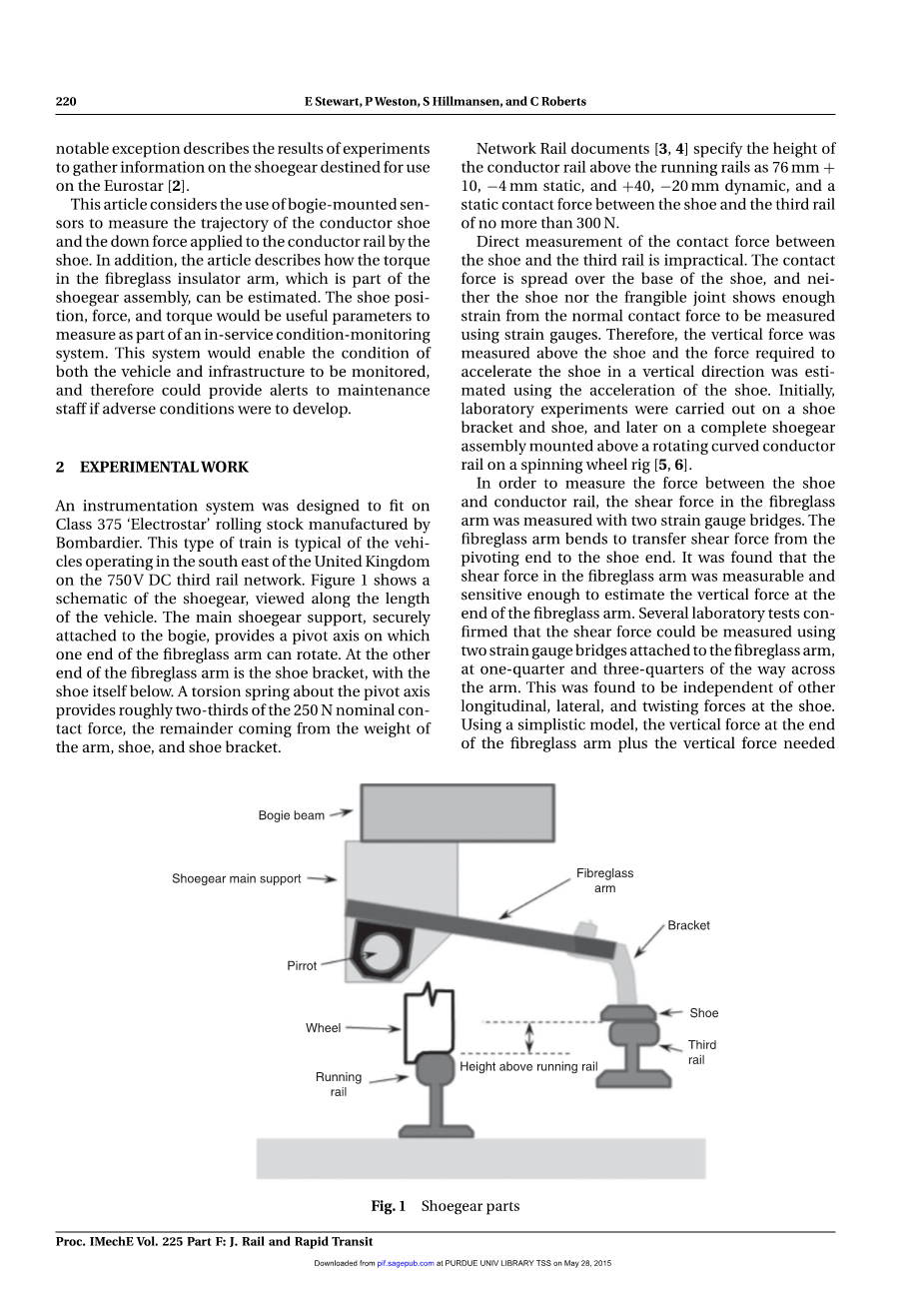
仪表系统的设计适用于庞巴迪制造的Class 375#39;Electrostar#39;机车车辆。这种类型的列车是典型的在英国东南部750 V DC第三轨道网络上运行的车辆。图1显示了沿着车辆长度观察的靴轨的示意图。牢固地连接到转向架上的集电靴支撑件提供了枢转轴线,玻璃纤维臂的一端可以在该枢转轴线上旋转。在玻璃纤维臂的另一端是托架,集电靴本身在下面。围绕枢轴的扭转弹簧大约提供250N标称接触力的三分之二,其余部分则来自臂,靴和靴支架的重量。
网络铁路文件[3,4]规定导轨上方导轨的高度为76 mm 10,-4 mm静态, 40,-20 mm动态,以及靴与第三轨之间的静态接触力铁轨不得超过300 N.
直接测量鞋和第三轨之间的接触力是不切实际的。接触力分布在靴底上,并且靴和易碎接头在使用应变仪测量时都不会显示出正常接触力的足够应变。因此,在靴上方测量垂直力,并且使用靴的加速度来估计在垂直方向上加速靴所需的力。最初,在靴托架和靴上进行实验室实验,然后在安装在旋转轮装置[5,6]上的旋转弯曲导电轨上方的完整靴轨组件上进行实验
图1 集电靴零件
臂轴
第三轨
靴
玻璃纤维臂
运行轨道
车轮
集电靴机架
转向架梁
室实验。
为了测量靴和导电轨之间的力,用两个应变仪桥测量玻璃纤维臂中的剪切力。玻璃纤维臂弯曲可以将剪切力从枢转端传递到靴端。而玻璃纤维臂中的剪切力是可测量的并且足够灵敏以估计玻璃纤维臂末端的垂直力。几项实验室测试证实,剪切力可以使用连接在玻璃纤维臂上的两个应变仪桥来测量,横跨臂的四分之一和四分之三。可以发现这与靴上的其他纵向,横向和扭转力无关。通过简单的模型,可以发现玻璃纤维臂末端的垂直力加上在垂直方向上加速鞋支架和鞋所需的垂直力应该等于接触力。
测量第三轨道相对于运行轨道的高度是存在难度的,因为人们只能测量相对于转向架或车身的位移。可以使用实验光学系统从转向架或车身到运行轨道和导电轨进行测量,从而允许计算差值。该方法昂贵并且沿轨道的空间分辨率有限。在先前为东南火车[7]进行的工作中,使用从转向架到玻璃纤维臂的拉绳位移传感器来测量靴相对于转向架的高度。在当前的工作中,使用基于激光的非接触式的位移传感器来测量该位移。添加与位移传感器紧密耦合的惯性测量单元使得可以跟踪转向架的运动并将其结合到测量中。在实践中,Class 375车辆具有刚性的主悬架,因此可以假设从转向架到第三轨道的顶部进行测量等同于从行驶轨道高度到第三轨道高度的测量。不是从转向架测量到第三轨道本身的顶部,而是从转向架向下到玻璃纤维臂的末端进行测量,以便测量靴的高度。然而,这给出了集电靴的高度而不是第三导轨的高度,如果靴失去与第三导轨的接触,则会导致无法测量第三导轨高度,这就得到了一个强大的位移测量系统。
2.1仪器
图2 车载仪表
仪表包括一个惯性测量单元,其带有三个加速度计和三个速率陀螺仪,一个连接到转向架的非接触式位移传感器,以及两个完整的应变仪桥,用于测量玻璃纤维臂中的剪切力。图2显示了安装在转向架上的仪表箱,其中包含惯性测量传感器,应变仪放大器和串行数据接口组件。非接触式位移传感器用来测量从转向架到玻璃纤维臂的鞋端顶部的距离。
为了将仪表箱安装在靴臂上方,必须去除电弧屏蔽。由于仪器靴的导电电缆在试验中被移除,因此不会产生电弧放电的任何风险。由于靴子没有携带电流,所以不可能产生电弧。然而,电弧屏蔽还提供一些保护,以防止第三轨道或集电靴/支架与转向架之间的短路,例如在线路上的购物车被带入系统中。因此,设备的外表面涂有非导电材料。
八个应变计安排在两个独立的桥梁中,每个桥梁有效地测量玻璃纤维臂的一半(前/后)的剪切力。使用来自模拟设备的1B31应变仪调节器模块放大每个桥,增益设置为1000,带宽为1kHz。这两个桥的平均结果给出了玻璃纤维臂的剪切力。臂的前半部和后半部的弯曲差异与臂中的扭转有关,并且也已经进行了检查。
位移传感器与垂直方向成微小角度,玻璃纤维臂围绕其安装轴旋转,因此必须构建从测量位移到臂垂直高度相对于转向架的非线性映射。
加速度计和速率陀螺仪是高质量的单元,与车速信息和适当的处理相结合,提供了出色的方向和位置信息[8]。
传感器输出使用抗混叠滤波器进行调节,在转向架箱内转换成数字信号,然后通过光纤电缆中继到车身内的个人计算机(PC)。这消除了对多芯信号电缆的需求,并提高了安全性和抗电气干扰能力。转向架箱内的微控制器协调模拟到数字(A / D)转换(在单独的16位A / D设备上执行)和转换数据的串行化,以便通过光纤链路进行传输。加速度计,陀螺仪和位移传感器的带宽约为200 Hz,而应变仪桥的带宽为1 kHz。图3显示了从下方向上看的转向架箱的视图。玻璃纤维臂下侧的四个应变计(图中圈出)装在橡胶混合物中。另外四个应变仪位于臂上表面上的相同位置。
图3 车载仪表视图
在车身内部是PC,定制的通用串行总线(USB)到光纤电缆接口,以及24 V电源。将来自仪器的数据流记录到磁盘以供以后处理和分析,还记录了由车载列车监控系统提供的列车速度和全球定位系统(GPS)。
2.2试验
试验是使用Southeastern train 375类车辆进行的。 Ramsgate和Faversham之间的路线安排在Birchington on Sea和Swalecliffe与Chestfield之间的上线进行恒速试验。在该部分上进行三次试运行,恒定速度为20,50和75英里/小时。在恒速运行期间,仪表化的靴在尾随车上。靴的厚度为22毫米(新的为25毫米)。来自惯性传感器的数据以每秒750个样本收集,而应变仪数据以每秒3000个样本收集。
3.结果
将试验期间收集的数据带回实验室进行分析。将来自横摆率陀螺仪的曲率信息与速度信息结合使用,以确定所收集数据的哪些部分属于恒定速度部分。通过匹配第三轨道中的间隙来执行在三个测试速度下收集的数据的最终相互对准。
3.1超过铁路水平面的高度
导轨上方导轨的高度(a.r.l.)来自非接触式位移传感器数据。该传感器测量转向架和靠近靴架的玻璃纤维臂末端之间的距离。然后将几何校正应用于测量,以识别转向架和鞋底之间的绝对垂直距离。为了使高度高于轨道水平面,然后应用一个常数来表示转向架和运行轨道顶部之间的距离。转向架本身相对于运行轨道的顶部移动。然而,375级车辆的主要悬架非常坚硬,以至于这种运动小到可以忽略不计(通常小于2毫米)。当车辆弯曲时,还存在潜在的偏移,因为车身和转向架相对于运行轨道的横向水平滚动。然而,发现这个误差小于1毫米。第三轨的计算高度a.r.l.仅在鞋与导电轨接触时有效。有时靴在跳跃时会失去与导电轨的接触,例如在最初接触斜坡时,或者在靴停留在止动器上的间隙部分。在仓库中,鞋子放在止动器上,将高于轨道水平面的高度设置为53毫米。
在图4中显示了以50英里/小时的速度在16公里轨道上测量的高度。虽然这是一个动态测量,但轨道主要保持在72和86毫米的静态公差之间,并且大致位于标称76毫米。如果第三根导轨不存在,则由止动器支撑,使测量高度高于53 mm的导轨高度。 20和75英里/小时的结果相似,但在较低速度下的高频活动较少,在较高速度时较高。这些结果也与先前使用拉绳排列获得的结果相比较,并显示了类似的结果。该鞋偶尔会下降到53毫米以下,即为止动器设定的水平,特别是在75英里/小时。这是因为止动器连接到靴束上,这是一种柔性结构,其又安装在转向架轴箱之间的隔离垫上。当鞋子落到止动器上时,冲击力导致鞋束弯曲,从而允许鞋子瞬间低于其标称最小位置。
高于铁路水平高度[mm]
]
距离[km]
图4 50mile/h时高于铁路水平的高度
图5显示了三种速度中每一种导体轨道高度的分布。对于这种计算,除去了与第三轨(集电靴停在止动器上)的间隙相对应的数据,显示了上下静态公差和标称值,结果在三种速度下是一致的。根据累积概率分布,可以确定导体导轨低于72 mm的静态最小值的14%,高于静态最大值86 mm的3%。平均值为77毫米,接近标称值76毫米。
图5 高度的概率密度a.r.l. (不包括下游)[mm]
概率密度
高度a,r,l[mm]
在实践中,概率分布可以按公里计算,然后用平均值和标准偏差表示。通过这种方式,可以建立特别高或低的导电轨区域。或者,可以平滑原始高度数据以消除高频变化,并将结果分类为高,中或低。
3.2力
靴轨的垂直接触力规定为250plusmn;50N。高频动力可能位于该范围之外,例如当靴离开导电轨并且接触力降至零或与斜坡接触时接触力通常相当高的地方。作用在靴及其支架上的力的简化模型如图6所示.Fa是玻璃纤维臂内的剪切力,Fc是接触力,mg是靴和支架的重量。理想情况下,接触力可以直接测量,但是,这是不切实际的。因此,可以通过间接估计。等式(1)显示了靴和支架上的力与产生的垂直加速度之间的关系
mzuml; = Fc minus;Fa –mg
图6 作用在靴和支架上的力
接触力可以建模为
Fc = Fa mg mz
应变仪桥用于测量玻璃纤维臂内宽度两个位置的剪切力,即玻璃纤维臂中的剪切力,平均值为Fa。将靴的重量增加到该测量的力来给出了接触力的估计。该估计排除了与加速靴的质量相关的动态力(mz项)。一个更好的模型将包括手臂的旋转分量,可以通过修改mz项中的质量来近似。
图7显示了在相同的1km轨道段上以三种速度的纤维玻璃臂中的静态重量和剪切力之和获得的接触力。 y轴显示每个速度的200和300 N的静态下限和上限。还显示出了第三轨道的轨道高度上方的高度,y轴上的“H”对应于标称76mm。该图包括一个长的和两个短的间隙。
力[N]
距离[km]
图7 1km截面上20,50和75mile / h的接触力,以及第三轨高度(H = 76mm)
三种速度下的力是相似的,除了尖峰往往存在更频繁和更快速的随着速度增加的情况。在大多数情况下,力处于规定的250plusmn;50 N范围内。正如人们所预料的那样,力在20英里/小时时最平滑,其结果与其他情节相似,但峰值力较小。斜坡和不良的接头会导致力的尖峰,特别是在高速时。在与15.135公里,15.630公里(仅75英里/小时)和15.950公里的上坡道接触时,估算的接触力会有很大的振动。由于玻璃纤维臂的动态特性,结果不一定等于接触力。当下降斜坡将靴引导到止动器上时,到达间隙部分时的力不那么极端。在其间隙,靴支架悬挂在安装在鞋束上的止动器上。在这些条件下,力的变化与鞋束的振动有关。在有缺口部分的出口处的力主要是从靴梁到斜坡的初始过渡。
资料编号:[4950]
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


