磁性行星齿轮箱的研制外文翻译资料
2021-12-21 22:00:28

英语原文共 10 页
磁性行星齿轮箱的研制
程志煌1、米卿蔡1、大卫G.多雷尔2、博尔仁林3
国立成公大学机械工程系台南701,
格拉斯哥大学台湾电子与电气工程系,格拉斯哥G12 8LT,
英国机械与机电工程学院,国立台塑大学,台湾云林632湖尾乡。
本文介绍了一种新型磁性行星齿轮箱的设计。我们讨论了操作理论和模拟设计。通过测量传递转矩和齿槽转矩,建立并验证了仿真结果。磁性行星齿轮箱的工作原理与机械行星齿轮箱相似,只是它是无接触的,不需要齿轮润滑。因此,它具有三种传动方式相同的特点,具有高速减速比和高耐久性。设计程序的起点是避免可能的滑动(即磁极滑动),我们提出了三个步骤来获得磁行星齿轮的最大数量。我们表明,使用更多的行星齿轮是一种提高传动扭矩的方法。在这种设计中,齿槽转矩可以很高。我们评估了利用有限元分析和测量人造齿轮箱性能的潜力,其中设计高估了齿槽转矩(由于各种原因),我们提出了降低齿槽转矩的方法,并对磁齿轮的发展进行了文献综述,以说明磁齿轮的发展,突出了该设计的创新之处。
指数项分析、有限元、磁性齿轮、磁性行星齿轮箱、减速比。
- 介绍
机械齿轮和齿轮箱广泛应用于各种动力传动和变速,以及工业机械的重要控制。然而,它们有一些固有的问题,如接触摩擦、噪音和热。因此,它们需要定期保养和更换润滑油。为了避免这些问题,几位作者提出了磁性齿轮和齿轮箱(使用高性能钕铁硼磁铁)(见下文)。磁性齿轮最初是用只能传递低扭矩的低能铁氧体材料研制的。高能钕铁硼磁铁现在可以传输更高的扭矩。电机与磁性齿轮的组合适用于在清洁环境中的输送机中实施,在清洁环境中,需要非接触式操作、低噪音和高耐久性(如半导体和FT LCD制造厂,以及许多其他应用)。参考文献[1]–[3]表明,简单的磁力齿轮是可能的,但它们的转矩密度低,速度比低,并且只有一种传动模式。这种简单的传动装置如图1(a)所示。为此,提出了几种新型的磁力齿轮来克服这些缺点。[4]中描述的磁力传动装置当时是一种新型传动装置。该变速箱如图1(b)所示,传动扭矩为5.5牛米,速比为3:1,每容积扭矩为1.7千牛/米。后来,磁性蠕虫和斜齿轮被制成了[5]和[6]——它们的排列如图1(c)(蠕虫)和图1(d)(斜齿轮)所示。磁性齿轮填充1(c)由昂贵的SMCO磁性材料制成。该齿轮箱的传动比为33:1,最大传动扭矩为11.5牛米。利用蜗杆和蜗轮的总体积,在[5]中的蜗轮的扭矩密度约为0.1 kNm/m。在图1(d)中,斜齿轮取代了[5]的蜗杆。在这种情况下,转矩密度和速度比较低,但可以获得更多的传动方式。数字对象标识10.1109/tmag.2007.914665
在[7]中提出了一种新型的磁力齿轮。这产生了超过100 kNm/m的传递扭矩密度;速度比为5.5:1。这是在[8]中进行分析、制造和报告的[如图1(e)]。它是专门为发电应用而设计的,其中高速和低速转子通过几个固定的钢段耦合。如图1(f)所示,用内部辐条磁铁替换高速内部转子的表面安装磁铁,可以进一步修改[7]中的设计。该变速箱具有较高的扭矩密度和速比,如[9]所述。后来,Okano等人[10]提出了图1(b)所示变速箱的超导版本。值得注意的是,使用磁控管结合更高的导电率可以提高变速箱的扭矩。但是,由于所需的冷却系统和电源,这会增加相当大的容量。上述各种改进设计旨在克服转矩密度低、速比低和单传动方式的问题,它们都有各自的优点。然而,本文提出了一种磁性行星齿轮机构(MPG)与钕铁硼磁铁,如图2所示。齿轮结合了机械行星齿轮系统的结构和磁吹扫的传动原理[图1(a)]。这三种传动模式和高速减速比。同时还应指出,磁性行星齿轮的数量是提高MPG传动扭矩的关键。在图2中,显示了三个行星齿轮,但可以将此数字增加到6,以便将变速箱扭矩增加大约2。本文稍后将对行星齿轮之间的耦合进行研究。MPG系统具有磁直齿轮箱的优点(即布置简单、无接触),可以在生产成本较低的全自动装配线上进行制造。它为一些新的应用提供了一些优势,例如风力发电、电力推进等,可以直接使用单输入和单输出齿轮箱、ORASA差速齿轮箱,从而将变速传输和转换为FIX本文描述了MPG变速箱概念验证原型的设计。描述了设计过程,并利用有限元分析(FEA)从传动和齿槽转矩两方面对设计进行了模拟。构建并测试了一个原型,以验证FEA研究。提出了在保持传动转矩的同时减小齿槽转矩的设计改进方案。
二.程序设计
A基本设计
齿轮箱设计中的主要因素是尺寸、速比和最大传动扭矩。这些都是应用规格所要求的。为了避免可能的滑动和磁极滑动,MPG中每个磁齿轮的磁极间距应相同。考虑图3所示MPG的结构几何。MPG中与极距的关系可以表示为
从关系式中,极对数(1)可以改写为
式中,和分别是磁头、刨刀、和齿轮的极对数。其中(2)的相对数类似于机械齿轮组中的模块。因此,MPG系统的几何关系是
将(2)代入(3),可以得到极对关系。
如果设置了或,则获得另一个和之间的关系。在设计之初,我们必须确定各种齿轮副和气隙长度,然后根据应用的模块关系计算出各种半径。半径应包括齿轮之间间隙的裕度(气隙长度),以便半径应包括每种情况下气隙长度的一半。
图1。磁齿轮装置的发展。(a)磁性齿轮;(b)参考文献[4];(c)参考文献[5];(d)参考文献[6];(e)参考文献[7];和(f)参考文献[9]。
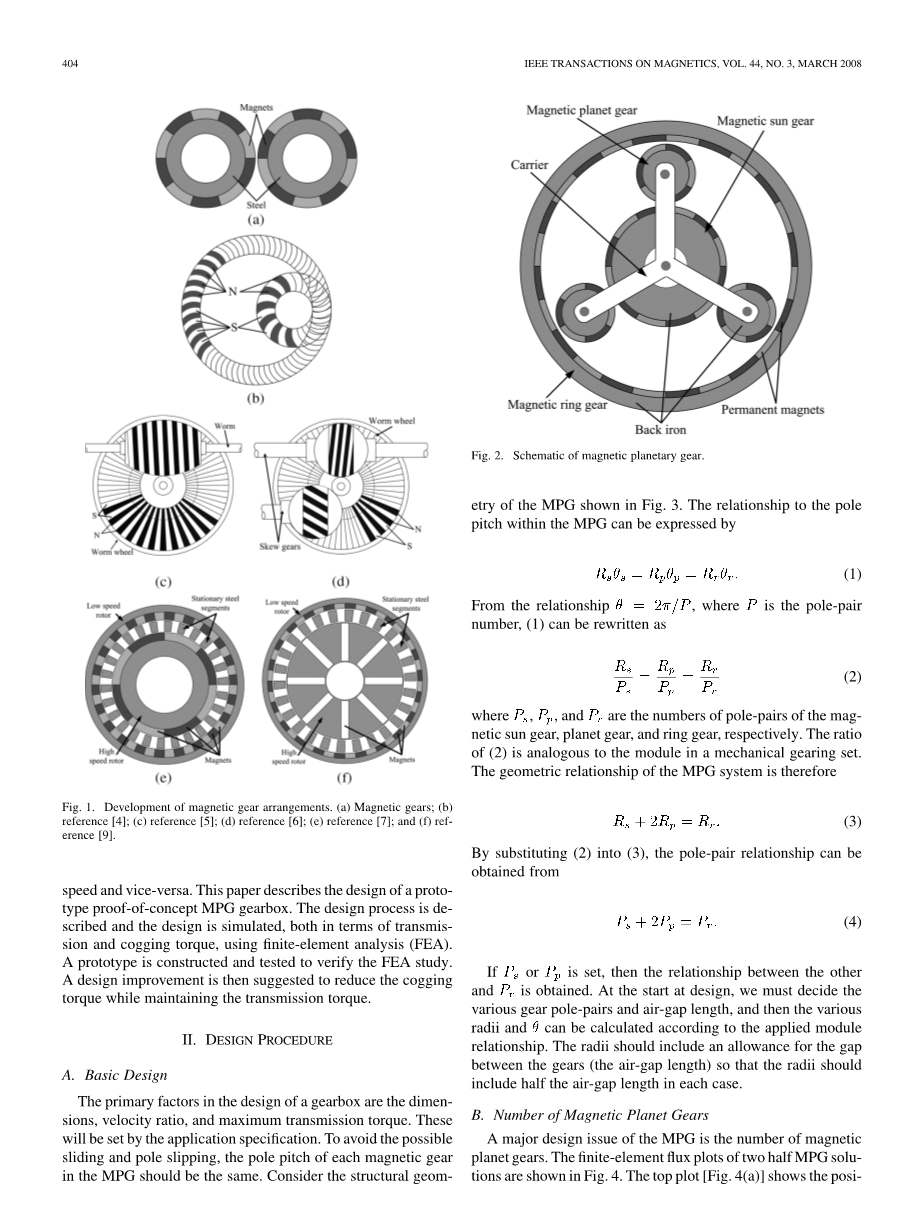
图2。磁性行星齿轮示意图。 图3。显示尺寸参数的MPG四分之一几何。
- 磁性行星齿轮的数量
磁性行星齿轮(一个完整的行星齿轮,其中一半在该排列中有三个行星齿轮)的位置正确。图4(b)中的图显示了一个完整的行星齿轮和两个由四个行星齿轮组成的半行星齿轮。然而,在这个模拟中,行星齿轮的数量设置不正确(在这个例子中,它应该是三个或六个,而不是四个),并且行星齿轮不同步。因此,在这种布置中,不同齿轮之间的扭矩会发生变化,变速箱无法正确传递扭矩。可以使用四个平面齿轮进行同步;但是,它们不会在机器周围均匀分布。这可能会导致轴承过度磨损,因为齿轮上会有不平衡和过度的力,因此这种安排是不明智的。因此,下面提出了一种计算行星数的方法。
步骤1)确定极对比后,简化后的极对比由下式得出:
步骤2)计算行星齿轮的总可能数量,如下所示:
步骤3)确定行星齿轮的数量:
虽然可以计算出磁性行星齿轮的实际最大数量,但不必使用所有这些齿轮。使用所有齿轮将增加最大传输扭矩;它可能会导致相互的磁干扰,造成阻力,从而降低传输扭矩并增加齿槽转矩。
图4。正确和不正确行星齿轮数的MPG通量图。(a)正确的行星齿轮排列(三个磁性行星齿轮)。(b)不正确行星齿轮装置(四个磁性行星齿轮)。
- 减速比
MPG有三种传输模式。在第一种模式中,行星齿轮承载着驱动齿轮的驱动齿轮,因此,角速度相关性由以下公式给出:
其中wr,wr和wc分别是磁性太阳齿轮、齿圈和行星齿轮架的角速度。在第二种模式中,磁性太阳齿轮是输出,因此磁性齿圈和行星齿轮架是输入;因此
在第三种模式下,使用磁性齿圈作为输出,以便
第一种模式通常用于减速。从(9)开始,减速比是通过保持齿圈或太阳齿轮静止来获得的,i.e即wr=0,或ws=0。因此,从(9)开始的减速比是
或者
当Ps小于Pr。因此,(12)产生更高的速度减速比(13);因此,如果需要高速减速,最好采用保持环静止。当将(12)与[12]中的机械行星齿轮比相比较时,可以观察到极对相当于机械行星齿轮箱中的齿。
- 概念验证实例
考虑一种安排,磁太阳对行星齿轮的极对比为6:3。从(4)开始,我们有Pr=12。使用6:3:12的极对比,半径比(2)为2:1:4。因此,模块为10,因此MPG尺寸可由半径比(Rs=20mm、Rp=10mm和Rr=10mm)确定。其中包括0.25 mm的半气隙长度。极对的节距theta;s,theta;p theta;r可以用关系式theta;=2Pi;/p和(1)来解决。MPG的计算参数如表一所示。磁性行星齿轮的最大数量Nprsquo;等于12,甚至[来自(5)和(6)],使用(8)得出Np=6。用(12)计算减速比为3:1。
- 有限元分析
表中的参数用于测量[11]。假设MPG的永磁体为烧结钕铁硼,磁轭为实心,由1008钢制成。
通过移动太阳齿轮和在太阳表面施加最大应力来研究扭矩。
麦克斯韦应力是通过在太阳齿轮表面(太阳齿轮和植物齿轮之间)上方或环形齿轮内部的几个半径处施加应力来检查的。为了获得变速器的扭矩曲线,行星齿轮保持在同一位置;而为了获得用软轴(但载体保持在同一位置)来调整的组合齿轮。
- 通量图分析
图3所示的平面图。4和5给出了MPG的性能。在图5(a)中,磁性太阳齿轮和齿圈之间几乎没有耦合,从而增加了传递的扭矩(耦合也会产生齿槽转矩),因此传递的扭矩全部通过行星齿轮传递。通常MPGS用于减速;这会导致太阳齿轮和齿圈半径之间存在很大差异。然而,如果太阳和行星齿轮之间所需的速度差不太大,则太阳和行星齿轮的半径可能更近(具有低极距、高极对数和非常小的行星齿轮)。在这种情况下,应检查太阳齿轮和齿圈磁性联轴节,如果存在干扰,则会产生拖曳扭矩(由于表面磁铁中的涡流会降低传递的扭矩)和增大的齿槽扭矩。太阳齿轮和行星齿轮之间以及行星齿轮和齿圈之间的磁力联轴节,在机器布置正确时,可以增加传递扭矩。图5(b)显示了六个工厂齿轮的使用。可以看出,磁性行星齿轮之间存在耦合。这种干扰会削弱传输功率,降低效率,并可能增加齿槽转矩。需要高性能磁铁来获得高传输扭矩,在这种情况下,小尺寸的MPG产生行星齿轮的紧密耦合。
- 传递扭矩
传递扭矩是MPG设计的关键。本文模拟了电磁平面齿轮固定时,传动机构和传动机构周围的传递扭矩,模拟结果如图6所示。从表二的图和结果中可以看出,三个和六个行星齿轮代表之间的扭矩大约为两个。起始点是图2中每一个热辐射的测量值的起始点。扭矩将有利(即顺时针方向反向锁定太阳耳运动的方向)通过一个磁极变桨运动(30),然后它将通过第二个磁极变桨运动的正循环。
如果比较磁性太阳齿轮和齿圈周围的最大传递扭矩,则齿圈扭矩远高于太阳齿轮扭矩(且大于两个齿圈的半径比)。这是因为太阳齿轮和齿圈的磁耦合不同。由于齿圈的内曲率比长齿轮的外曲率小,因此齿圈与行星齿轮的耦合性更好,这意味着太阳齿轮和行星齿轮之间会出现一个过度的极滑动。在表二中,磁性齿圈的扭矩密度接近100 kNm/m(带有六个磁性行星齿轮),对于三个行星齿轮的排列,扭矩密度小于50 kNm/m。
- 齿槽转矩
PG产品为可拆式,称为起动扭矩。增加MPG长度或磁性行星齿轮的数量会增加齿槽转矩。齿槽转矩模拟结果如图7所示。MPG在本次模拟中没有负载,它是通过顺时针方向旋转太阳齿轮(图8)来获得的,这样可以使载体保持在同一位置,但可以用太阳齿轮旋转行星齿轮。起始位置是两个相对的磁铁边缘在太阳齿轮和行星齿轮之间的最小气隙点对面的位置[图8(a)]。
太阳齿轮上的磁铁节距为30机械度,当磁铁中心相互面对时,以及当磁铁边缘相互面对穿过最小气隙点(起点)时,将出现零齿槽转矩点。后一点是一个稳定的零齿槽转矩点(即变速箱希望在此位置对齐),而前一点是一个不稳定的零齿槽转矩点。因此,齿槽振动通过一个完整的周期在一个磁铁间距,即30机械度的太阳齿轮运动。随着运动的增加,齿槽转矩的初始上升表明一个转矩试图将太阳齿轮推回到初始位置,这是正确的,因为初始起点是磁铁边缘朝向的位置,这是一个稳定的转矩点。这可以通过图8来解释——太阳齿轮是顺时针方向旋转的,而扭矩是逆时针方向正的。六行星齿轮装置显示的齿槽扭矩是三行星齿轮装置的两倍以上。这是由于第IV-B节中讨论的行星齿轮联轴器造成的。
- 实验验证
利用表1中给出的规格,绘制了一个三维分解图,以确保MPG制造的可行性,如图9(a)所示。然后按照图9(b)所示制造。磁性行星齿轮是通过将铝轴插入钢制气缸来制造的。太阳、齿圈和行星齿轮以及行星齿轮架都可以自由转动,它们都用适当的机械轴承装配在一起,并安装在底板上。
第一个测试是评估减速比,看看是否有任何极点滑动。环形齿轮保持稳定,太阳齿轮驱动;测量太阳齿轮和行星齿轮架的速度,结果如图10所示。坡度表示MPG的减速比,经验证为3:1。进一步进行的试验包括静态扭矩试验,以评估变速器的扭矩,以及空载运转试验(其中太阳齿轮由驱动器驱动,托架可以自由转动),以评估齿槽扭矩。
- 测量传递扭矩
将齿圈和托架固定在本测试中,并将太阳齿轮轴从零扭矩位置旋转至90机械度,以检测可能的最大扭矩。图11显示了试验台上用于测量传递扭矩的装置。该装置与扭矩传感器相连,扭矩传感器依次与伺服驱动装置相连,以进行位移控制。扭矩和太阳齿轮位置的测量值为1至90,如图12所示。
将此特性与有限元模拟进行比较。结果表明,预测峰值与实测扭矩具有良好的相关性。模拟和测量试验不相同,需要强调这一点,因为这就是为什么测量扭矩不存在正半周循环的原因。可以观察到,模拟扭矩特征fig.6实际上是反向的,这是在曲线拟合中的一个练习。
首先,考虑到第13条中的定位,这显示了用弹簧旋转的平面轴承(磁铁角差持续增加,称为扭矩角)。太阳齿轮逆时针旋转,行星齿轮顺时针旋转。正扭矩表示从初始启动位置(稳定的零扭矩点)开始冲入轴承的扭矩。这不会发生,因为齿圈和托架被锁定,并起到防止齿轮箱旋转移动的作用
资料编号:[4114]
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


