具有动态吸振结构的轮内开关磁阻电动机驱动的半主动振动控制:概念与验证外文翻译资料
2021-12-23 22:23:34
英语原文共 12 页
具有动态吸振结构的轮内开关磁阻电动机驱动的半主动振动控制:概念与验证
摘要:本文提出了一种新型的轮内电机(IWM)驱动电动车振动控制算法,以提高其乘坐舒适性,减少轮内电机振动。四分之一车辆模型首先基于由交流磁阻电动机(SRM)驱动的动态振动吸收结构(DVAS)开发。该模型考虑了耦合的纵向 - 垂直动力学和未知的道路剖面以及由开关磁阻电机引起的不平衡电磁力被视为激励。动力学和边界模型都是商业上可用的半主动扩展,它们被用作悬架和动态吸振结构结构的执行器。基于开发的模型,提出了一种混合加速度驱动阻尼算法的混合控制器,以减少簧载质量和开关磁阻电机的振动。随后通过利用多目标进化优化方法求解多目标优化问题来确定控制器参数。分析了随机道路和颠簸激励的数值模拟结果,最终进行了多体仿真,验证了所提出的控制器的可行性。结果表明,与传统的轮内电机悬架系统相比,所提出的混合控制器能够有效提高乘坐舒适性,降低开关磁阻电机振动。
索引术语:混合悬架控制,轮内电机,开关磁阻电机,动态吸振结构,多体仿真
I. 介绍
由于更严格的车辆排放标准和对传统车辆的更高要求为电动汽车(EV)的发展创造了条件[1],[2],电动汽车的动态控制近年来引起了汽车工业和学术界的广泛关注[3]–[7]。电动汽车用一个或多个发动机代替内燃机,它可以分为两大类,即从推进系统的角度驱动的中央驱动和轮内电动机(IWM)[8]。与集中驱动相比,轮内电机驱动型具有多种优势,包括节省空间和重量,快速系统响应,高能效和灵活配置[9]。然而,安装在车轮内部的电动机的性能会受到轮毂空间的严重限制,增加的非簧载质量不仅会降低乘坐舒适性和道路操纵性,还会因恶劣的振动环境而缩短电机的使用寿命[10]。
与传统车辆的悬架系统相比,轮内电机驱动的电动汽车的悬架通过集成减振和车辆驱动的功能演变为耦合的轮内电机悬架系统,并且由气隙变化引起的不平衡电磁力(UEMF)成为额外的内部振动源对于轮内电机悬架系统[11]。轮内电机与悬架之间的轮内电机悬架相互作用因此值得进一步研究。迄今为止,已经提出了各种方法来减少轮内电机引起的振动并改善轮内电机驱动的EV的动态性能。从轮内电机控制的角度来看,Takiguchi[12]等人使用电流控制算法来减小径向力的幅度。 Sun [13]等人在轮内电机启动过程中使用修改的电流斩波控制器改善了悬架垂直响应。对于悬架子系统,提出了动态吸振结构(DVAS)的概念来改善轮内电机悬架垂直响应.Hredzak[14]等人和Nagaya [15]等人利用动态吸振结构将定子连接到簧载质量或簧下质量,数值模拟结果表明,这种新颖的结构可以提高车辆的乘坐舒适性和道路操控性。然而,这些研究并未考虑轮内电机和纵向动力学。Qin [11]等人对不同类型的动态吸振结构进行了对比研究,其中先前忽略了电机动力学,并表明通过在定子和非簧载质量之间放置动态吸振结构,系统可以获得更好的性能。如上述论文所述,动态吸振结构的应用引入了额外的弹簧阻尼元件,并从系统控制的角度形成了一种新型的多输入悬架系统,这为轮内电机驱动的电动汽车的减振带来了新的挑战。然而,到目前为止,与基于动态吸振结构的轮内电机悬架有关的文献主要集中在悬架参数优化上,并且非常需要进一步改进新系统。
可控悬架系统可分为主动和半主动控制,被认为是改善悬架系统垂直动力学的最有效方法之一,在过去的二十年里,这一领域已经做了许多卓越的工作[16]–[21]。近年来,主动悬架系统已在理论上研究用于轮内电机悬架系统。 Shao [22]等人和Wang [23]等人用Hinfin;理论合成了主动控制力,仿真结果表明性能有了很大提高。 由于在这些研究中使用的对象是传统的悬架模型,仅增加了非簧载质量,因此需要对真实的轮内电机悬架系统进行改进,其中包含不平衡电磁力和纵向动力学。
为了解决上述问题,提高轮内电机驱动电动汽车的动态性能,本文提出了两种基于动态吸振结构的轮内电机悬架系统的半主动控制算法。 考虑到动态吸振结构的尺寸限制,采用两个市售的半主动阻尼器作为执行器,本研究的贡献可归纳如下:
(1)开发了基于动态吸振结构的轮内电机悬架系统模型,该模型具有电机和耦合垂直纵向动力学,并提出了半主动控制策略来改善模型垂直动态性能。
(2)半主动控制力由位于悬架和动态吸振结构之间的两个市售可控阻尼器分配和实现,并且提出了一种新颖的加速度驱动阻尼控制策略来减少 所需的传感器数量。
(3)通过多体仿真(MBS)软件研究和验证所提出的模型和半主动悬架控制算法的可行性。
(4)本文的其余部分安排如下:首先,开关磁阻电机模型在第2节中介绍。基于动态吸振结构的轮内电机悬架系统模型,纵向动力学和可控制的扩展模型在第3节中介绍。所提出的混合悬架控制器在第4节中说明。数值模拟和多体仿真验证在第5节中进行。最后讨论了结论和未来的工作。
II. 开关磁阻电机建模
常用的轮内电机包括永磁同步电动机(PMSM)[24]和开关磁阻电动机(SRM)[25]。永磁同步电动机具有很多优点,广泛应用于电动汽车。 然而,开关磁阻电机因为它的优点被认为是轮内电机驱动电动汽车的强有力候选者,例如,永久磁铁的分配,直线结构的分配以及容错[10]。
本节介绍了基于傅立叶级数的非线性开关磁阻电动机模型,并将输出扭矩和开关磁阻电动机的不平衡电磁力形式化。
- 电磁和电压方程
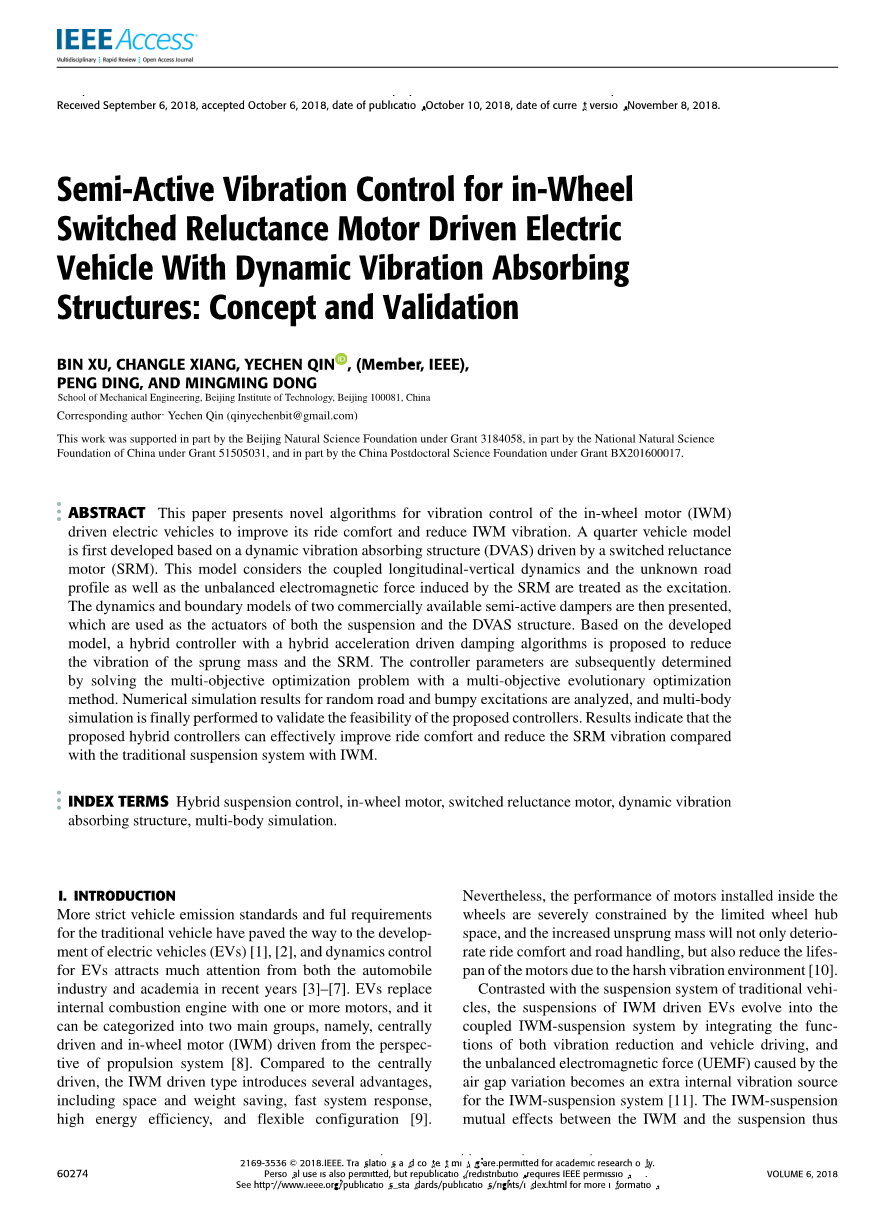
本文采用带外转子的8/6四相开关磁阻电机,额定功率为5kW。 开关磁阻电机的原理图如图1所示。当转子位置theta;= 30°时,转子与定子极完全对齐,而theta;= 0°对应于完全未对准的位置。 磁共同能量定义为:
其中i是相电流,psi;(theta;,i)是流动连接。 考虑到i和电感L(theta;,i)都确定psi;(theta;,i),本文采用基于傅里叶级数的方法来表示L(theta;,i)。 通过考虑傅立叶展开的前三个项,电感L(theta;,i)可写为[26]:
其中L0,L1和L2是currenti的函数,可以根据以下公式计算:
其中La,Lu和Lm分别是对齐位置,未对齐位置和中间位置的电感。 La(i)和Lm(i)可以由两个系数组成:
根据法拉第 - 伦茨定律,流量链可以表示为psi;(theta;,)=。 然后通过定义和(= = 0),任何相位k的流量链可以计算为:
利用(5)中给出的流量链接,相位k的电压可以表示如下[27]:
其中w是电动机的角速度。可以根据(6)表示非线性:
- 电磁转矩和UEMF
由于共能等于机械能,开关磁阻电机的转矩T和径向力Fr可以基于(1)中定义的共能来计算:
其中lg是定子和转子之间的气隙,如图1所示。
图1.8 / 6-四相交流磁阻电动机的方案
开关磁阻电机的k相扭矩可以通过组合(8)和(5)来表达,如下:
其中和定义为:
与扭矩相似,相位k径向力可以计算为:
其中delta;是研究相k的定子和转子之间的重叠角。 注意,径向力与气隙lg成反比,这意味着相对的定子极之间的气隙变化将产生不平衡电磁力并影响车辆系统响应。 考虑到气隙偏心率ε,开关磁阻电机径向力如图2所示。
图2.气隙偏心引起的不平衡径向力。
整体垂直的不平衡电磁力可表示为:
其中beta;k是定子相位k与垂直轴之间的夹角,beta;1= 0°,beta;2= 45°,beta;3= 90°,beta;4= 135°。 先前的研究表明,不平衡电磁力的存在主要影响先天性质量的振动[11]。
III. 悬架建模
本部分介绍了基于动态吸振结构的悬架系统,纵向动力学和可控制的阻尼模型。
- 基于动态吸振结构的悬架系统
基于动态吸振结构的悬架系统的结构和优越性已在[11]中得到很好的研究。 根据研究结果,本文以基于动态吸振结构的悬架为对象,其配置如图3所示。
无源和基于动态吸振结构的悬架系统的动力学可以通过牛顿运动定律来描述,如下:
图3. 轮内电动驱动的电动汽车悬架模型:(a)无源(b)基于动态振动吸收结构的轮内电动机悬架
其中x *表示位移,图3(a)中的下标b,sa,wa分别表示簧载质量,定子和轴的总质量,以及转子质量。 对于基于DVAS的IWM悬架系统,下标s1,r,s分别代表簧下部件和轴的总质量,转子质量和定子质量.xz是道路不平整度。图3中, = 是垂直的不平衡电磁力,(13)和(14)中所有其他参数的值将在后面讨论。
连接轴和定子的图3(b)中的动态吸振结构由弹簧和阻尼器组成。 该连接表明动态吸振结构可以垂直支撑定子并减少由于道路不平整引起的振动。物理实现将在下一步中讨论。
B.纵向动力学
开关磁阻电机产生的扭矩将使车辆向前和向后行驶。以下给出了动力学车轮方程:
其中J是车轮惯性; = w是车轮角速度; 是开关磁阻电机产生的总扭矩; r是轮胎有效滚动半径,Fx是由于摩擦力与地面之间产生的纵向力。本文将魔力矩用作非线性轮胎纵向模型,该模型的参数来自米其林MXV8 205 / 55R16轮胎。
利用纵向轮胎力Fx,车辆纵向动力学方程可表示为:
其中M是总质量; v代表速度速度.对应于气动阻力,Rx代表滚动阻力。 和都可以计算为:
其中,A和mu;分别代表阻力系数,车辆前部区域和滚动阻力系数。 是垂直载荷,可表示为[32]:
通常,道路不均匀性导致气隙变化,这将会导致不平衡电磁力并且使轮内电机悬架系统垂直响应恶化。 同时,开关磁阻电机产生的扭矩平衡了由纵向方向上的空气运动和道路摩擦引起的力。 关于垂直 - 纵向耦合动力学的更多细节,参见[11]。
C.可控制的阻尼模型
目前已经开发出了不同类型的可控制阻尼器用以减轻系统振动,并且它们已经在许多中高端车辆中商业化,包括凯迪拉克塞维利亚STS,Acura MDX和GM-Lacrosse等[33],[34]。 在所有阻尼器类别中,磁流变(MR)和比例阀都是汽车工业中最常用的类型[33]。本文使用这两种类型的可控阻尼器来提高系统性能。ZF Sachs的连续阻尼控制(CDC)阻尼器用于产生悬架可控制的阻尼力[33],由于空间有限,动态吸振结构中使用了较小的MR阻尼器。悬架阻尼力和动态吸振结构阻尼力可以表示为:
许多方法如Bouc-Wen和多项式模型可以用[35] - [37]来准确描述这些函数,本文采用非参数模型,其中可控制的阻尼力表示为
其中n是函数顺序,本文中取n = 2。和是要确定的系数,i是控制电流。两个采用的可控阻尼器基于上述方程建模,带有MR阻尼器的负载框图如图4(a)所示,图4(b)所示为速度力图。
图4. Lord制造的磁流变阻尼器:(a)试验台中的阻尼器(b)力 - 速度图
注意:(20)中描述的阻尼器动力学不限制输出力。计算出的力可能是不可实现的,因此导致过大的控制电流。 从图4(b)推导出的阻尼器边界模型也应用于本节[33],如图5所示。(20)中的边界模型和阻尼器模型之间的关系将在下一节中说明。
图5. 磁流变阻尼器边界模型
IV.基于动态吸振结构的悬架混合控制
为了评估控制器性能,本节首先将悬架控制视为多目标优化问题(MOOP),然后为基于多输入动态吸振结构的悬架系统开发混合控制器。 然后提出一种新颖的混合加速度驱动阻尼(hybrid-ADD)算法来减少总传感器数量。最后使用基于多目标进化的优化方法来计算控制器参数。
A. MOOP配方
悬架设计的目的是找到多个目标之间的平衡点,而之前的研究总是在摇铃空间的约束下将悬架系统控制视为多目标优化问题[16],[39],[40]。 对于轮内电机悬架系统,开关磁阻电机的诱发振动,不仅会降低悬架系统的性能,还会导致悬架系统过早疲劳失效,并损坏轴承和齿轮等部件[41]。 为了提高新型轮内电机悬架系统的乘坐舒适性并减少电机振动,要解决的多目标优化问题定义为(21)。
B.混合制算法
作为最经典的半主动控制算法,天钩控制被提出通过虚拟地将车辆簧载质量连接到天空来减少车辆底盘垂直振动[42]。地钩控制以天钩算法的双向方式执行,以提高道路处理能力[43]。通过结合这些算法的优点,然后提出了混合控制,这是通过放置在簧载质量和非簧载质量之间的单个可控阻尼器实现的[39]。与传统的混合控制类似,提出了用于配制的基于动态吸振结构的模型(14)的新型混合控制器的理想结构,以降低簧载质量加速度和定子加速度(21),如图6所示。
图6.用于基于动态振动吸收结构的轮内电动机悬架系统的新型混合控制器的结构
从图6中可以看出,理想的结构需要两个虚拟阻尼器,其中和的系数分别连接到天空和地面。 由于上述框架在理论上是不可能的,因此本文使用天钩和地钩控制的控制律来模拟虚拟阻尼器的行为。 与传统悬架系统不同,位于动态吸振结构内部的额外可控阻尼器可以通过两个可控阻尼器进行仿制,并且该方法解决了传统混合算法中出现的力碰撞问题。 新型混合悬架控制的控制律可表示为:
其和是天棚和地面控制系数,下一节中将选择替换无源阻尼器,即图3(b)中的和。
C.轮内电机-悬架系统的混合加法控制算法
由(14)定义的新型轮内电机悬架系统将开关磁阻电机悬挂在动态吸收结构上,基于该动态吸收结构,与传统的混合控制相比,所提出的混合控制器(22),(23)需要更多的响应以便可
资料编号:[3814]
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


