基于Python语言的汽车振动噪声分析软件的界面设计外文翻译资料
2021-12-23 22:34:15
英语原文共 15 页
摘要
现场和实验室试验表明,车轮啸叫声压级随着迎角和滚动速度的增大而增大。然而,增长方式背后的确切原因仍然未知。为此,将简化的时域分析振动模型与非线性滚动式接触理论结合起来,对车轮啸叫问题进行了研究。利用该模型模拟了某试验台车轮在不同滚动速度和迎角下的振动速度。在室内试验中,模拟的振动速度与实测的车轮啸叫声压级有很好的相关性。模拟了不同迎角和滚动速度下滚动接触的横向爬电距离和力。研究发现,由于车轮振动、侧向力和爬电距离的相互作用,车轮的振动速度幅值随迎角和滚动速度的增大而增大。从每周期振动能量输入的角度解释了车轮啸叫的产生机理。此外,研究了车轮啸叫声压级随滚动速度和迎角增大的原因,并从能量输入和非线性蠕变行为的角度对这些现象进行了理论解释。
目录
1前言
啸叫噪声由于其明显的音调特性和较高的声压级,往往备受关注。在欧洲数百万人被车轮发出的啸叫声所困扰,而这一问题一直没有得到令人满意的解决[1]。现场试验[2]发现,啸叫声压级随滚动速度增大而增大。由于现场测试[3]中的速度降低,注意到轮啸叫中存在一些可测量和可听的差异。车轮啸叫声压级随轧制速度的增大而增大的事实,也得到了证实[4]。轨道曲线半径对车轮啸叫的影响已有普遍报道[2,5]。此外,室内试验表明,车轮啸叫声压级随着迎角的增大而增大,直到轮缘接触钢轨[4]。
用Heckl和Abrahams[6]的数学模型对圆盘的振动速度进行了模拟,认为曲线啸叫是一种不稳定的轮子振动,它是一种极限环振动,其速度幅值等于或非常接近于侧行速度。Chiello等人的模拟也表明振动速度稳定在滑动速度[7]以下。此外,Vincent 等人[8]假设在ScienceDirect杂志主页上可获得的接触内容列表中的车轮横向振动速度振幅等于平均横向滑动速度,可近似为
(1)
其中是空气的声阻抗,是轮轨之间的偏航角,V0是纵向滚动速度。记录前内轮的声压级,并与方程(1)的估计值进行了比较,一致性较好,特别是对高轧制速度[8]。然而,到目前为止,还没有对车轮啸叫声压级随滚动速度和迎角增大的原因给出详细的解释。
建立了车轮啸叫的频域和时域数学模型。频域模型通常用于研究车轮啸叫的稳定性,如Heckl[9]、de Beer等人[10]建立的模型和Hsu等人[11]人们普遍认为,最终将使用时域啸叫模型来预测啸叫幅度[11]。还有一些模型是在时域中开发的,比如前面提到的Heckl和Abrahams[6]开发的模型,它是基于Green函数的。时域中的另一个模型由Chiello等人[7]开发,忽略了旋转和纵向蠕变力,并假设了一个随相对接触速度线性降低的动态侧向力。该模型的一个特点是用滑移速度来估算啸叫时车轮的接触速度。在研究啸叫声压级时,应采用时域模型。
Glocker 等人[12]对转向架的四个轮子进行了线性稳定性分析,发现轮子啸叫主要是由内部引导轮产生的,这证实了现场测量[8]中的观察结果。对于领先的内轮,也发现,接触有一个大的横向爬电,但没有旋转[13]。一些调查表明,纵向爬电距离的存在实际上可以抑制由于横向爬电距离引起的啸叫噪声。因此,有必要忽略一些因素,如旋转和纵向爬电距离等,以便重点研究车轮啸叫的产生机理。本文在15年首次提出的模型的基础上,建立了一个简化模型,着重研究了侧向爬电距离对车轮啸叫的影响。然而,对于建模的复杂性,人们普遍认为,对物理现象的理解越好,数学就越简单,计算就越简洁[16]。在铁路曲线上,导轮容易与外轮法兰接触,因此,车轮啸叫的产生是由于轮缘与轮轨外侧摩擦所致。在一次研究中,在带和不带法兰触点[5]的滚柱钻机上测量了啸叫噪声。研究发现,车轮与法兰接触时,啸叫噪声的声压级降低约10dB。在实验室试验[4]中也观察到这种效应。车轮啸叫的声压级随迎角的增大而增大,当轮缘与钢轨接触时,直至迎角达到20mrad。试验结果表明,前轮对内轮是啸叫噪声的突出散热器,外前轮由于侧向法兰接触而没有啸叫。
目前,人们普遍认为,车轮啸叫是由于横行在接触补丁的车轮铁路接口。转向架通过轨道曲线时,滚动速度和车轮速度之间存在偏差。由于滚动速度与钢轨切向之间的偏航角,内轮经历较大的横向爬电,导致作用于内轮轮缘的横向力,摆动的横向力会使车轮产生交感共振振动。除了主要由轨道曲线半径和转向架轴距决定的侧向爬电距离外,其他参数,如确定车辆的几何尺寸、轮轨横剖面、倾斜度、轨距和轴载也会定量地影响噪声。然而,曲线啸叫的大多数模型都是基于这样的假设:车轮啸叫是由接触面上的横向力激发的,认为轮轨接触面上的横向滑移是啸叫噪声的主要原因。本文的模型也是基于这一假设。将摩擦蠕变曲线的负斜率所表示的负阻尼简单地表示为侧向粘附率与爬电距离的关系。Shen等[17]开发了一个模型,整合了 Johnson[18]和Kalker[19]制定的更准确的接触力描述。然而,该模型在高爬电距离下不存在负斜率,根据负阻尼理论[2],这对车轮啸叫的产生至关重要。该模型也忽略了Kraft给出的摩擦系数随速度变化的特性[20]。之后,de Beer等人[10]综合了Shen等人的模型,并对轮轨滚动接触中的接触力学进行了描述。采用有限元法对阻尼轮进行分析,阐明了环形阻尼器的减振机理[21]。此外,采用三维模型对车轮的横向爬电变化进行了瞬态分析,以考虑摩擦系数假定为常数[22]的接触点处的摩擦现象。
在下一节中,详细介绍了建模过程,并说明了建模方法的合理性。第三节从能量输入的角度,模拟了单周不稳定振动和稳定振动时的侧向爬电距离、侧向力和功率输入;随后,说明了车轮啸叫声压级随滚动速度和迎角增大的原因。最后,在最后一节列出了本文的结论。
2方法学
实验方法及车轮啸叫与车轮振动的相关性见2.1节,随后通过考虑振动系统的功率输入,进一步建立了车轮振动的数学模型。
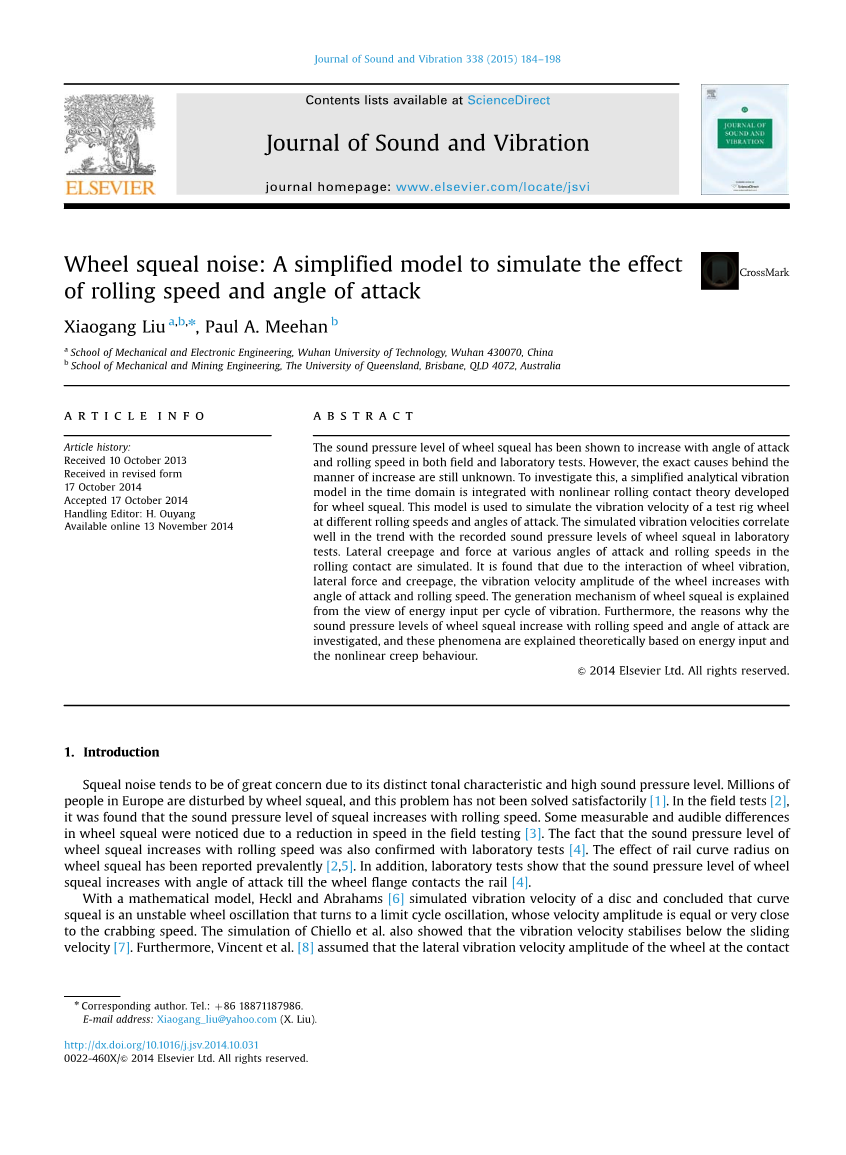
图1.滚动接触双圆盘试验台:(a)试验台正视图和(b)试验台有限元分析模型
2.1实验方法
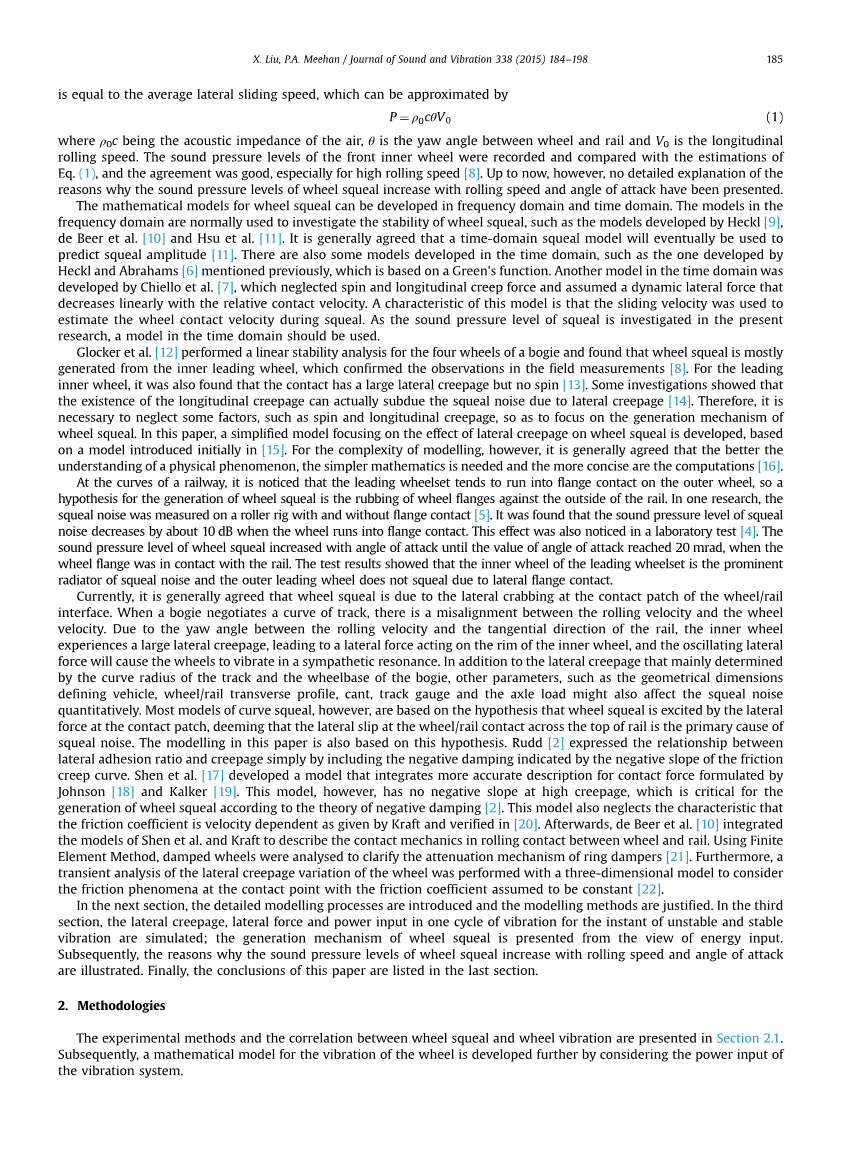
采用滚动接触双盘试验台,研究了车轮啸叫的特性。试验台的主要组件如图1 (a)所示。试验台的上轮由矢量控制的恒速电机驱动,由于试验中仅有上轮由电机驱动,因此可忽略接触区的纵向爬电距离。可通过调节上、下车轮间的偏航角,模拟车轮滚动方向与钢轨切向的不对中。偏航角可以用[15]中介绍的激光测距仪测量。本试验台的一些参数列于表1。基于惠斯通全桥配置,在试验台上应用了应变计。该构型由4个主动应变计元件组成,2个安装在钢板弹簧顶部的弯曲应变方向,另2个安装在钢板弹簧底部的弯曲应变方向。这种结构提供了最大的弯曲应变输出,忽略了轴向应变和钢板弹簧的扭转,这可以使测量中的噪声最小化。它还可以补偿热效应对传感元件电阻的影响。用有限元法研究了这种接触力测量方法的可行性。图1(b)中的有限元分析模型显示4根应变片在试验台上的布置,其中S1、S2、S3和S4表示应变片的位置,Q和W表示滚动接触中的侧向力和法向力。测量方法的详细信息见 15。将麦克风放置在距离下轮5cm、高于地面80cm的位置。麦克风在1000 HZ附近的误差容限小于0.15dB。用麦克风以不同的迎角和滚动速度记录声音。对于24mrad和800rev/min (RPM)的情况,在图2中显示了声谱,特别是图2中的声谱中的双峰是由于[15]中研究的轮子旋转的影响。
图2.在24mrad,800RPM 条件下,轮啸叫的声谱
|
描述 |
值 |
|
下轮(R 1,R1t)的纵向和切向曲率半径 |
0.213m,0.300m |
|
下轮(轮辋,腹板)的厚度 |
0.026m |
|
密度(rho;) |
0.015m |
|
下轮的内半径(R1′) |
7800kg/m3 |
|
上下轮杨氏模量(E) |
0.0325m |
|
上轮(R2,R2t)的纵向和切向曲率半径 |
175GPa |
|
上轮的厚度 |
0.085m |
|
接触速度范围 |
0.040m |
|
下轮滚动速度范围 |
0.080m |
|
泊松比(nu;) |
0-17.84m/s |
|
迎角范围 |
0-800RPM |
|
蠕变系数(C22) |
0.28 |
|
正常负荷(W) |
0-26mrad |
|
模态质量(m) |
3.14 |
|
模态阻尼(c) |
1000N |
|
模态刚度(k) |
3.1kg |
表格1.
试验台的参数
在图2中,主模式的声压级指示啸叫,因为它比其他模式的峰值至少高6dB。为了确定车轮啸叫的来源,使用有限元方法对上轮和下轮进行建模和分析,边界条件为内部轮毂受约束,并且外部轮毂轮子边缘自由[23]。对滚轮轴向振动水平的测量表明,滚轮的响应是共振的,其频率可以从静态共振试验[24]中识别出来,因此研究滚轮的静态响应也可以了解滚轮的特性。对于上车轮,第一固有频率为4867HZ,其模态为平面内模态,对啸叫噪声贡献不大;第二固有频率的模态为平面外模态,但高达7456HZ,远高于图2中主峰的频率。与图2中的声音频谱相比,上轮似乎对图2中啸叫噪声的辐射贡献很小。此外,根据一个环形方程,理论预测研究了车轮的振动特性。采用硬尖锤进行了模态试验,并根据模态试验谱拟合出了主导模态的模态参数。在前面的论文[15]中列出了一些平面外模式的振动特性。在本文中,这些分析进一步扩展到表2中,包括所有的固有频率和振型高达5000赫兹。为了对
资料编号:[3785]
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


