振动系统建模外文翻译资料
2021-12-25 17:01:22
英语原文共 46 页
2
振动系统建模
- 介绍
- 惯性元素
-
刚度元素
- 介绍
- 线性弹簧
- 非线性弹簧
- 其他形式的潜在能量元素
-
耗散元素
- 粘性阻尼
- 其他形式的耗散
-
模型构建
- 介绍
- 微机电系统
- 人体
- 滑动切削
- 切割工艺
- 振动设计
- 总结练习
2.1介绍
在本章中,描述了构成振动系统模型的元素,并通过示例说明了这些元素用于构建模型的用途。通常存在三个包括振动系统的元件:i)惯性元件,ii)刚度元件,iii)耗散元件。除了这些元素之外,还必须考虑外部施加的力和力矩以及来自规定的初始位移和/或初始速度的外部干扰。
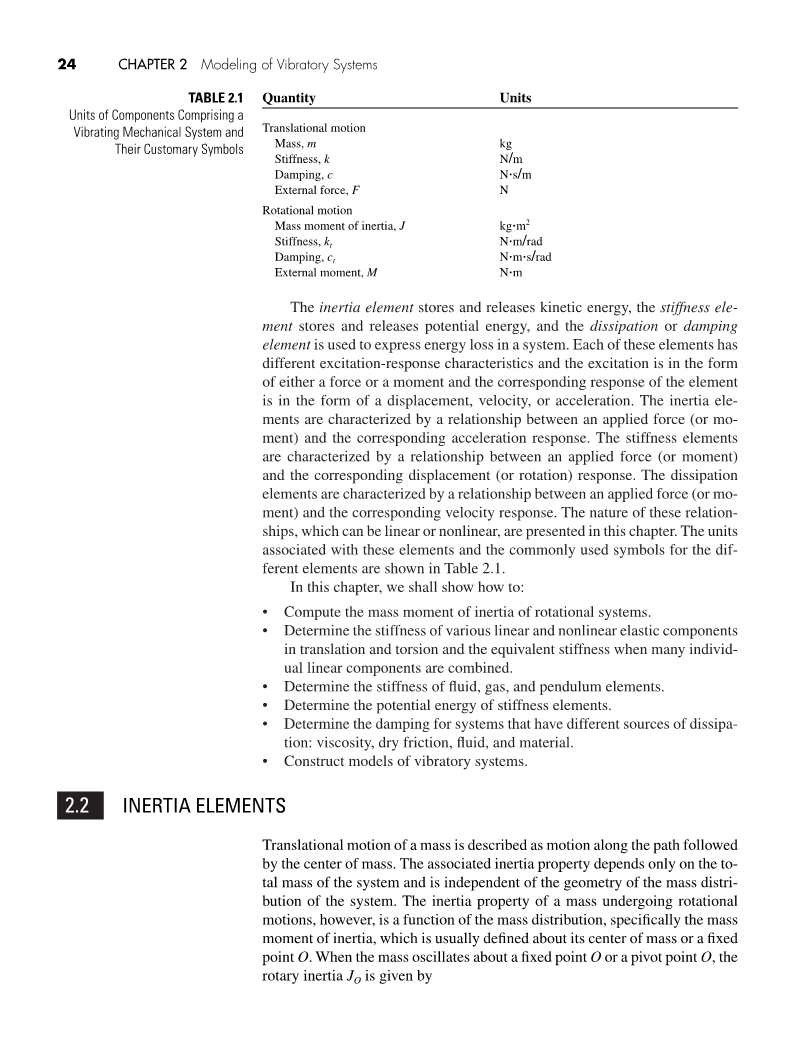
表2.1组成振动机械系统的部件的单位及其惯用符号
量 单位
平移运动质量
米 kg
刚度 kn/m
阻尼 c nbull;s/m
外力 fn
旋转运动质量
惯性矩 j kgbull;m2
刚度 kt nbull;m/ rad
阻尼 ct nbull;mbull;s / rad
外力矩 mnbull;m
惯性单元储存和释放动能,刚度单元储存和释放势能,耗散或阻尼单元用于表示系统的能量损失。这些元件都具有不同的激振响应特性,激振形式可以是力的形式,也可以是力矩的形式,相应的元件响应形式可以是位移、速度或加速度的形式。惯性分量的特征是一个作用力(或运动)与相应的加速度响应之间的关系。刚度单元的特征是所施加的力(或力矩)与相应的位移(或旋转)响应之间的关系。耗散元件的特征是所施加的力(或运动)与相应的速度响应之间的关系。这些关系的性质可以是线性的,也可以是非线性的。与这些元素相关的单位和dif- ferent元素的常用符号如表2.1所示。在本章中,我们将说明如何:
bull;计算转动系统的质量转动惯量。
bull;确定平移和扭转中各种线性和非线性弹性元件的刚度,以及许多单独线性元件组合时的等效刚度。
bull;确定流体、气体和摆锤元件的刚度。
bull;确定刚度单元的势能。
bull;确定不同来源的阻尼系统:粘度、干摩擦、流体和材料。
bull;构建振动系统模型。
2.2惯性元素
质量的平移运动被描述为沿着路径的运动,其后是质心。相关的惯性属性仅取决于系统的总质量,并且与系统的质量分布的几何形状无关。然而,经历旋转运动的质量的惯性特性是质量分布的函数,特别是质量惯性矩,其通常围绕其质心或固定点O定义。当质量围绕固定点振荡时O或转动点O,转子惯量Jo 由下式给出JO = JG md2
m是元素的质量,詹是质量质心的转动惯量,和d是重心的距离o .在Eq。(2.1),惯性质量时刻詹和乔都定义对轴正常的飞机质量。由平行轴定理可知,质量惯量通过质心G与平行轴通过另一点O之间的关系为-。一些常见形状的质量惯性矩如表2.2所示。接着讨论了惯性特性与力和模量的关系以及这些特性对系统动能的影响。在图2.1中,质量m以大小的速度平移x - y平面上的x#表示出来。并给出了速度矢量的方向在图中,沿着作用在这个物体上的力的方向。在第一章叙述线性动量和角动量的原理时,假定惯性特性与力和力矩之间存在一定的关系。这些关系在这里被重新审视。根据式(1.11)给出的线性动量原理,控制质量运动的方程为
Fi=d(mxi)/dt
其中当m和i不随时间变化时方程可以简化为
Fi=mx
由式(2.2)可知,对于平动运动,惯性特性m为力与加速度之比。表2.1所示的质量单位也应由式(2.2)可知。由式(1.22)可知,质量m的动能为
T=0.5(xi*xi)=0.5mx^2
我们可以利用恒等式ibull;i = 1。由式(2.3)给出的定义可知,平动动能与质量成线性正比。此外,动能与速度大小的二次幂成正比。为了以另一种方式得到式(2.3),让我们考虑第1.2.4节中讨论的功能定理。我们假设图2.1所示的质量从初始静止状态(此时的velocity为零)转换到tf时的最终状态。由式(1.26)可知,在力Fi作用下所做的功W为
W = JFi # dxi = Jmx$i # dxi = Jmx$dx=Jmx$ x# dt = Jmx# dx# = 1 mx# 2(2.4)
这是我们在关系式dx = x dt用过的。因此,动能为
T1t = tf 2 — T1t — t0 2 =0 = W=0.5mx^2
这与方程(2.3)相同。
对于只有角速度u在平面内旋转的刚体,从1.2.3节讨论的角动量原理可以看出
M = Ju
其中M为沿运动平面法向作用于质心G或不动点O(如图2.2所示)的力矩,J为相关的质量惯性矩。由式(2.6)可知,对于旋转运动,惯性特性J为力矩与角加速度之比。同样,可以验证表2.1中J的单位与式(2.6)一致。这种惯性特性也称为转动特性。此外,为了确定惯性特性J如何影响动能,我们使用式(1.25)来表示系统的动能为
T=0.5Ju^2
因此,旋转运动的动能只与惯性特性J(质量惯性矩)成线性正比。此外,地磁能量与角速度大小的次幂成正比。
到目前为止,在讨论振动系统的惯性特性时,假定惯性特性与运动的位移无关。这种假设并不适用于所有的物理系统。对于例2.2中讨论的滑块机构,惯性特性是角位移的函数。其他的例子也可以在文中找到
例2.1质量惯性矩的确定
我们将说明是如何确定几种不同刚体分布的质量转动惯量的
统一的磁盘考虑图2.2a中所示的统一磁盘。如果JG是圆盘中心的质量惯量,则由表2.2可知
JG=0.5mR^2
因此,关于点O的质量转动惯量,距离点G为R,等于
JO = JG mR2 =1.5mR^2
统一标准的连杆
一个长度为L的条被悬置,如图2.2b所示。棒材的质量沿长度呈单形分布。然后杆的重心在L/2处减小。从表2.2中,我们可以得到
JG=1/12mL^2
因此,利用平行轴定理后,点O的质量转动惯量为
JO=1/3mL^2
例2.2滑块机构:具有变化惯量特性的系统
在图2.3中,显示了一个以点O为轴心的滑块机构。一个质量ms的滑块沿着质量ml的均匀条滑动。另一个条是在点O#39;处旋转的,它的一部分长度为b,质量为mb,另一部分长度为e,质量为me。我们将确定该系统的转动惯量JO,并表明其与角位移坐标w的关系。如果ae是质点m到O的中点的距离ab是质点mb到O的中点的距离,那么从几何关系中我们就能得到
r 21w 2 = a2 b2 — 2ab cos w
因此,系统的所有运动都可以用角坐标w来描述。该系统的转动惯量JO在下面的式子中被给出
JO = Jml Jms 1w 2 Jmb 1w 2 Jme 1w 2
其中Jml = 3 mll
当达到Eqs。(b)和(c)中使用了平行轴定理, Jm, Jm。从方程式。(b)和(c),很明显旋转连杆的惯性力矩jmb e l该系统的转动惯量JO是角位移w的函数。
2.3刚度元素
2.3.1介绍
刚度元件由不同的材料制成,它们有许多不同的形状。根据需要选择元素的类型;例如,减少从机械到支撑结构的振动传递,使建筑物与地震隔离,或从受到冲击的系统中吸收能量。图2.4展示了一些具有代表性的商用刚度元件类型及其典型应用。刚度单元存储和释放系统的势能。检查势能是如何定义的,让我们考虑illustra,如图2.5所示,在春天是固定在结束啊,和在另一端,一个力F级是沿着方向的单位向量j。在这个力的作用下,让元素从一个初始或未拉伸长度瞧一瞧 x方向的j。在——这种变形,F和x之间的关系可以是线性的,也可以是非线性的。
图2.4(a)用圆柱橡胶支座进行横向运动的建筑物或公路基础隔震;(b)钢丝绳隔离器,隔离机械的垂直运动;(c)悬挂系统中用来隔离垂直运动的空气弹簧;(d)用于隔离垂直运动的典型钢卷弹簧;(e)烟囱调谐质量阻尼器中用于抑制横向运动的钢丝绳弹簧。资料来源:霍姆斯咨询集团;钢丝绳目录,第6页,Enidine股份有限公司,2006;http://www.enidine.com /Airsprings.html 2006 Enidine Incorporated;C系列隔振器图http://www.isolationtech.com/sercw.htm;调谐质量阻尼器图http://www.iesysinc.com / Tuned_Mass_Dampers.php 2001-2002工业环境Sysytems Inc。
图2.5(a)具有作用于其上的力的刚度元件和(b)其自由体图。
如果Fs表示作用于刚度单元内的内力,如图2.5b所示的自由体图所示,则在下弹簧位移中,该内力与外力F相等且相反;FS=-FJ也就是说,由于力Fs试图将刚度单元恢复到其未变形的构型,因此将其称为恢复力。当刚度单元变形时,能量储存在该单元中,当刚度单元未变形时,能量释放。势能V定义为刚度单元从变形位置到未变形位置所做的功;也就是说,将元素还原为其原始形状所需要的功。对于图2.5所示的元素,它由下面的公式给出
V1x 2 = JFs # dx= J—Fj *dxj = JFdx(2.8)
我们已经用了恒等式jbull;j = 1和Fs = -Fj。和动能T一样,势能V也是一个标量函数。弹簧所经历的变形与外力之间的关系可以是线性的,如第2.3.2节所讨论的,也可以是非线性的其中Fs是一个保守力。保守力所做的功与初始位置和最终位置之间的路径无关。线性的,如2.3.3节所述。在第2.3.2节中还介绍了等效弹簧弹簧的概念。
2.3.2线性弹簧
可移动的线性弹簧
如果一个力F作用于如图2.6a所示的线性弹簧上,这个力将产生这样一个挠度
xf1x2 = kx(2.9)
其中系数k称为弹簧常数,力与位移之间存在线性关系。基于方程式。(2.8)和(2.9),弹簧中储存的势能V由下面的公式给出
V1x 2 = JF1x 2 dx = Jkxdx = k Jxdx = 1 x^2 (2.10)
因此,对于线性弹簧,相关势能与弹簧刚度k成线性关系,并与位移量的二次幂成正比。扭力弹簧如果考虑一个线性扭转弹簧,如果在弹簧一端施加一个力矩t,而弹簧的另一端保持固定,则
t1u 2 = ktu (2.11)
其中kt是弹簧常数u是弹簧的变形量。这个弹簧储存的势能是
V1u 2 = Jt1u 2 du = Jktudu = 2 ktu
线性弹簧组合
现在考虑不同的线性弹簧元件组合,并确定了这些组合的等效刚度。首先考虑图2.6b和图2.6c所示的平移弹簧组合,并考虑图2.7a和图2.7b所示的扭转弹簧组合。当两个弹簧平行时,如图2.6b所示,力F作用的杆与原位置保持平行,则两个弹簧的位移相等,故总力为
F1x 2 = F11x 2 F21x 2
其中Fj(x)是弹簧kj的合力,j = 1,2, ke是两个平行弹簧的等效弹簧常数,由下式给出
K=k1 k2
当两个弹簧串联时,如图2.6c所示,每个弹簧受力相同,总位移为
X=x1 x2
其中等效弹簧常数k的值由下面的式子确定
Ke=(1/k1 1/k2)^-1=k1k2/(k1 k2)
图2.7 两个扭转弹簧的:(a)并联组合和(b)串联组合
一般来说,对于N个串联的弹簧,我们有
Ke=k1 k2 k3 hellip;hellip;
对于N个并联的弹簧,我们有
Ke=1/k1 1/k2 1/k3 hellip;hellip;
图2.6b所示的弹簧组合势能由下面的式子确定
V(x)=v1(x) v2(x)
其中V1(x)为刚度弹簧的势能k1 V2(x)为刚度
资料编号:[3653]
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


