汽车电子液压制动系统的设计与仿真分析研究外文翻译资料
2021-12-25 17:02:39
英语原文共 6 页
汽车电子液压制动系统的设计与仿真分析研究
Li, Shoutao , Pei, Xinglong , Ma, Yongxue , Tao, Lihua , Zhang, W
摘要:本文详细设计了一种能够真实反映驾驶员制动意图的线控制动系统——电子液压制动(EHB)系统。对所设计的系统进行了仿真实验,结果表明,该系统能够实现对轮缸液压的平稳控制。这种新型制动系统安装在混合动力客车上,通过对四轮缸制动力矩的单独平稳控制,提高了车辆的稳定性。
关键词:线制动,电子液压制动系统,电子控制单元
一.前言
近年来,随着电子线控技术与车辆制动系统的结合,当今现代车辆的许多车辆子系统正在被改造成线控系统,使车辆变得越来越高效、安全、节能[1]。因此,电控液压制动(EHB)系统应运而生,成为研究热点[2,3]。
EHB系统是电子控制系统与液压制动系统相互作用的有机系统。它提供了更好的制动性能和大多数稳定功能,如ABS, TCS, ESC, EBD等,可以很容易地实现,没有额外的机械部件。EHB系统也称为电控液压制动系统[4,5]。它消除了制动系统中大部分的阀门,这是不同于传统的制动系统。它可以提供更快和准确的制动能力,消除复杂的机械和液压元件从传统制动单元[6]。本文研制了一种基于模块化的电子液压系统。在基于AMESim/Simulink的仿真平台上验证了该系统的性能,并在此基础上验证了EHB系统的一些基本特性。
二.相关著作
为适应社会对混合动力汽车日益增长的需求,对电子液压制动系统进行了积极的研究。汽车研究人员取得了许多重要的成果。中村英二[7]开发了EHB系统命名为“电控制动系统”(ECB)。他们提出的ECB集成了制动控制功能,如前/后发动机再生制动与液压制动之间的合作控制,ABS(防抱死制动系统),VSC(车辆稳定性控制),TRC(牵引力控制)等。ECB是一个EHB系统,控制轮缸液压电子压力。各轮缸的压力由线性电磁阀控制。因此,液压缸的液压控制是独立和平稳的。
David F. Reuter[8]给出了多种EHB液压设计配置。Delphi EHB开发中采用的配置包括使用带有独立隔离活塞的四轮故障保险和使用机械踏板感觉锁定。这种特殊的设计允许系统灵活性,固有的蓄能器预充电隔离,并能够优化所有车辆类别的故障系统停止性能。
Luigi Petruccelli[9]等利用AMESim软件建立了一个真实的EHB水力模型。他们建立了EHB试验台,构思了一种不需要ABS干预的中、低强度制动机动控制逻辑,以确定最佳的制动力分布和取决于机动的踏板感觉。他们还在Matlab/Simulink中实现了车辆模型。、
Seung-Jin Heo[25]开发了EHB半实物仿真系统,包括一个高压发生器和一个独立的制动压力控制系统。HlLS系统由三部分组成;硬件、软件和接口部分。EHB控制逻辑在他们的工作中得到了发展,并在PC机上实现。在HILS系统中对EHB控制器在各种驱动条件下的性能进行了测试,并与传统的VDC逻辑进行了比较。
尽管许多研究人员已经解决了EHB设计和控制中的许多关键技术,但在实际应用中仍有许多技术需要解决,如可靠性、系统性能等。
三.EHB系统的结构和功能
EHB是由高科技电子产品[11]集成而成的液压系统。在EHB系统中,电子单元提供灵活的控制,同时液压单元提供动力。因此EHB系统应具备以下特点[12-14]:制动踏板与车轮制动功率传递是分开的;制动力矩可通过程控单元根据踏板角度进行调节。
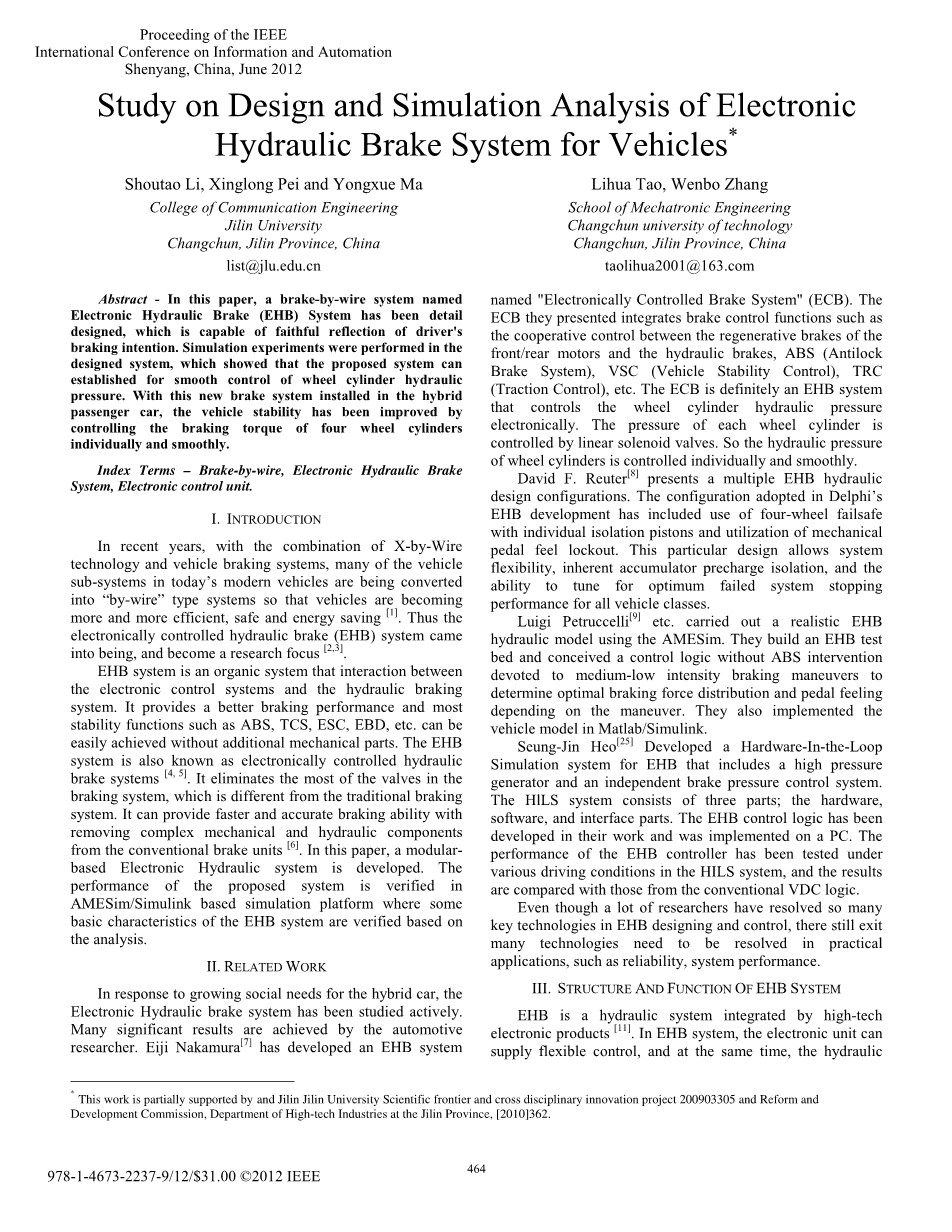
传统的制动系统利用一个很大程度上的机械环节,从制动踏板通过真空助力器,进入主缸活塞。而在我们设计的EHB系统中,现有的常规制动系统中有多个电子元件代替了机械元件[15-17]。所述EHB系统由图1所示的下列项目组成,以满足上述要求。制动踏板输入单元可检测驾驶员提供的制动踏板力,在驾驶员操作中产生适当的感觉。液压控制单元可根据需要单独调节各轮缸的液压压力。液压源作为摩擦制动力的动力源。为了满足这些要求,我们在EHB系统中设计了两种主要的模型,一种是硬件模型,另一种是软件模型。EHB系统硬件部分包括液压控制单元(HCU)、电控单元(ECU)和高压发生器子系统三个主要部分,如图1所示。软件部分包括车辆模型、EHB控制逻辑和后处理模块,保证了制动系统的制动性能。液压控制单元由高压发生器、四轮缸和制动管路组成,我们将在下一章详细介绍。
图1电子液压制动系统结构示意图
每个输入制动管都装有2p-2w常闭电磁阀,输出制动管也装有常闭电磁阀。我们把这些电磁阀称为输入阀。压力传感器安装在制动缸和输入电磁阀之间的管道上。左前轮和右后轮的紧急制动线一路通到主制动缸的一个孔,而右前轮和左后轮的紧急制动线通到另一个孔。所有这些都配有2p-2w常开开关电磁阀,即开关阀。
四个制动压缩管合并成一个连接到蓄能器的方式。仅制动缸管路中就有一个2p-2w常闭电磁阀,用于对制动液进行减压。我们称之为输出阀。压力传感器单独安装在上述电磁阀和蓄能器之间的管道上。电动液压泵的输出和安全阀被合并成与蓄能器连接的单向。电动液压泵的输入侧与安全阀的另一侧合并成与油杯连接的方式。电动液压泵的输出与蓄能器之间装有单向阀,在紧急情况下切断流体。四根钢瓶线合并成一条连接到油杯的路。所有四个制动缸是并联的,包括输入、输出和开关阀。
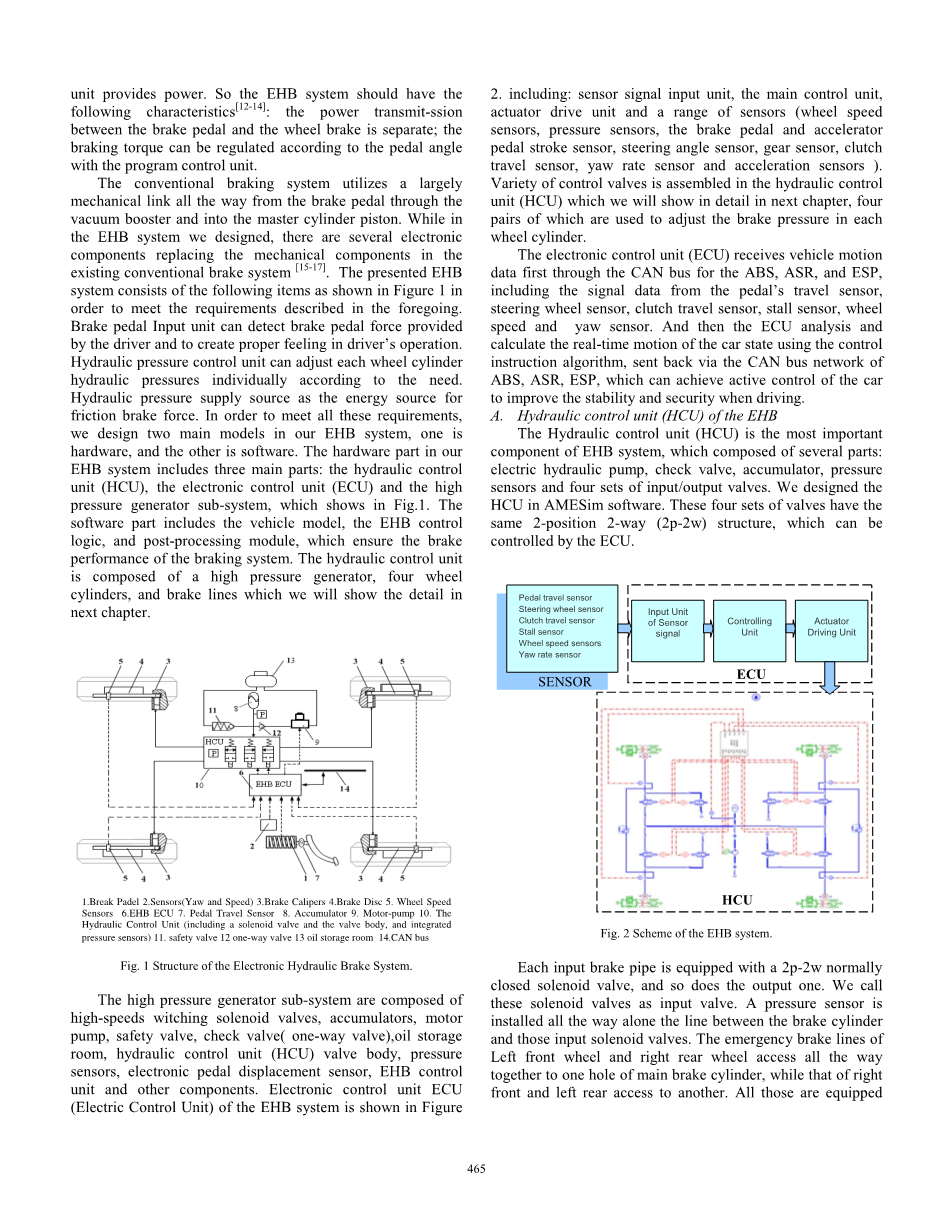
高压发生器子系统由高速电磁阀、蓄能器、电机泵、安全阀、止回阀(单向阀)、油库、液压控制单元(HCU)阀体、压力传感器、电子踏板位移传感器、EHB控制单元等部件组成。EHB系统的电控单元ECU(电控单元)如图2所示。包括:传感器信号输入单元、主控单元、执行机构驱动单元和一系列传感器(车轮速度传感器、压力传感器、制动踏板和油门踏板行程传感器、转向角传感器、齿轮传感器、离合器行程传感器、偏航率传感器和加速度传感器)。在液压控制单元(HCU)中装配有各种各样的控制阀,我们将在下一章详细介绍,其中四对用于调整每个轮缸的制动压力。
电子控制单元(ECU)首先通过ABS、ASR和ESP的CAN总线接收车辆的运动数据,包括来自踏板行程传感器、方向盘传感器、离合器行程传感器、失速传感器、车轮速度和偏航传感器的信号数据。然后利用控制指令算法,通过ABS、ASR、ESP等CAN总线网络,对车辆状态进行实时运动的ECU分析计算,实现对车辆的主动控制,提高车辆行驶时的稳定性和安全性。
A.EHB的液压控制单元(HCU)
液压控制单元(HCU)是EHB系统中最重要的部件,它由电动液压泵、止回阀、蓄能器、压力传感器和四组输入/输出阀组成。我们在AMESim软件中设计了HCU。这可由ECU控制的四组阀门具有相同的2位2路(2p-2w)结构。
图2 EHB系统方案
每个输入制动管都装有2p-2w常闭电磁阀,输出制动管也装有常闭电磁阀。我们把这些电磁阀称为输入阀。压力传感器安装在制动缸和输入电磁阀之间的管道上。左前轮和右后轮的紧急制动线一路通到主制动缸的一个孔,而右前轮和左后轮的紧急制动线通到另一个孔。所有这些都配有2p-2w常开开关电磁阀,即开关阀。
四个制动压缩管合并成一个连接到蓄能器的方式。仅制动缸管路中就有一个2p-2w常闭电磁阀,用于对制动液进行减压。我们称之为输出阀。压力传感器单独安装在上述电磁阀和蓄能器之间的管道上。电动液压泵的输出和安全阀被合并成与蓄能器连接的单向。电动液压泵的输入侧与安全阀的另一侧合并成与油杯连接的方式。电动液压泵的输出与蓄能器之间装有单向阀,在紧急情况下切断流体。四根钢瓶线合并成一条连接到油杯的路。所有四个制动缸是并联的,包括输入、输出和开关阀。
提出的EHB系统的压力源由蓄能器和电动液压泵组成。一般来说,蓄电池的重要指标选择是蓄电池容量的选择,蓄电池容量VA由预充气压力PA、系统需要工作的输出油量Vw、最大工作压力P1和最小工作压力P2决定。在蓄能器工作过程中,气体状态的变化符合理想气体状态方程:
⑴
式中,V1为P1最大工作压力下的气体体积;V2是P2最小工作压力下的气体体积;n是各向异性指标,在EHB 液压系统的工作过程中,蓄能器的工作特性是能够在较短的时间内提供快速、大量的油。因此能量释放速率较快,此时可等于绝热条件下的气体,设n=1.4。当压力从P1到P2时,蓄能器释放的油量为气体的体积变化量,命名为VW=V1-V2,可用的形式:
⑵
制动液由电动液压泵注入蓄能器,必要时释放。在EHB系统的工作原理中,我们知道电机泵的工作取决于蓄能器内部的压力,当蓄能器压力低于工作压力时,电机泵开始工作并停止工作,直到达到额定值。电机颠簸的数学模型为:
⑶
式中,Qb为油泵输出流量;
Sm为电机转速; Vb为油泵排量;
a为泵压力因子; Pbin为泵进口端压力
Pbout为泵出口端压力。
在制动系统中,蓄能器可连续快速多次提供超过12MPa高压的制动液。这就是能量如何以高压的形式储存的。
B.EHB系统的控制单元
根据上述EHB系统的基本原理,EHB系统的电子控制单元由输入通道、输出通道和微处理器控制单元三部分组成。整个程序的EHB控制系统如图3所示。
图3 EHB系统电气控制单元方案
输入通道由踏板行程传感器、车轮速度传感器、压力传感器、转向角传感器、偏航率传感器、横向加速度传感器等必要的传感器及其信号处理模块组成。EHB系统的ECU在工作时从传感器采集实时信号数据,分析判断当前车辆状况,并发出相应指令。
输出通道部分包括电磁阀的一系列驱动模块和液压泵电机单独的液压管路。驱动模块接收ECU指令,并将指令发送给执行机构(包括电磁阀和液压马达泵)执行相应的动作,以满足不同工况的制动要求。
微处理器控制单元是EHB控制系统的核心。主要功能是完成外部传感器信号的采集,对各种数据进行处理和分析,识别驾驶员的制动意图,做出正确的判断,实现EHB系统的制动功能。
四.模拟实验
为了测试EHB系统的性能,我们补充了一些仿真实验。采用模糊PI控制器对系统进行控制。首先,我们选择不同的间隔工作点轮缸制动压力控制间隔:低电压工作部分,媒介部分,高压工作部分,选择4分(28条,55条,90条,140条)设置PI控制器的参数,以及这些参数的变化为基础的模糊控制规则,使改进后的控制器来达到目标跟踪结果的价值。当工作区间和工作点确定后,转动PI控制器的各参数为每一个工作点,以确定工作点上的最优控制器参数。
在这里,我们只给出了一个PI控制器参数调整在低压设置为28bar。首先,我们只使用KP控制器来调节压力,同时设置Ki=0。轮缸压力阶跃响应曲线如图4所示。从图4 (a)可以看出,连杆参数所占比例较小,轮缸压力在很长一段时间内没有达到取值的目标。随着比例系数的增大(图4(b)~(c)),系统出现较大的超调,经过一段时间后达到稳定。当比例系数达到一定值时,系统开始严重震荡,甚至不稳定,如图4(d)所示。
图4 EHB系统参数P整定的阶跃响应
由于比例调节具有较大的超调量和稳态误差,应增加积分调节,同时比例系数应略大一些。然后,我们加入Ki,同时调整不同的Ki和Kp值,系统的阶跃响应如图5所示。我们将Ki由大到小进行调节,如图5 (a)~(d)所示。超调效果明显改善,当Ki降至图5 (d)所示时,超调几乎被消除,此时为了达到最佳效果,完全设置28bar工作点。kp的范围大概是:
图5 EHB系统参数P整定的阶跃响应
Ki的取值范围在0.005~ 0.025之间,大致在0.001~ 0.005之间。
其他工作点的参数调节过程与28 bar相似,55 bar处Kp的范围大致在0.008~0.025之间,Ki的范围在0.003~ 0.008之间。在0.008~0.025范围内确定了90巴处Kp的取值范围,在0.005~ 0.075范围内确定了Ki的取值范围。广义上,在0.015~0.075范围内确定了Kp在140 bar点上的取值范围,在0.008~ 0.017范围内确定了Ki的取值范围。
五.结论
EHB系统是电子控制系统与液压制动系统相互作用的有机系统。它提供了更好的制动性能和大多数稳定功能,如ABS, TCS, ESC, EBD等,可以很容易地实现,没有额外的机械部件。EHB系统也称为电控液压制动系统。它消除了制动系统中大部分的阀门,这是不同于传统的制动系统。它可以提供更快和准确的制动能力,消除复杂的机械和液压元件从传统制动单元.
本文详细设计了一种能够真实反映驾驶员制动意图的线控制动系统EHB及其控制器参数的调节。该系统通过对控制器参数的调整,可以实现对轮缸液压的
资料编号:[3647]
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


