
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
非光滑仿生射流表面减阻实验与数值研究
YunqingGu GangZhao JinxingZheng ZhaoyuanLi WenboLiu F.K.Muhammad
关键词:仿生射流表面;减阻实验;数值模拟;原因分析
摘要:考虑到非光滑表面仿生理论的特点,以降低物体的摩擦阻力为目的,以鲨鱼鳃缝为研究对象,对仿生射流表面进行了理论分析。采用实验和仿真相结合的方法,研究了仿生射流表面陀螺物体的减阻特性和减阻机理。利用扭矩信号耦合器在光滑表面实验模型和仿生射流表面实验模型对不同转速组的摩擦力矩进行了测试,得到了射流减阻特性和摩擦力矩特性曲线。数值模拟在SST中的应用k–omega;分析了在最佳转速下的湍流模型,以及光滑表面和仿生射流表面的特性。结果表明,仿生射流表面具有显著的减阻效果,减阻率与实验模型的转速、射流孔径和射流速度有关。计算结果与实验结果更接近,数值模拟结果略高于实验结果,但其值在允许的误差范围内,说明计算方法是正确的。通过对减阻实验的数值模拟,进一步验证了仿生射流表面的减阻特性。射流表面增厚了射流孔下游流场边界层的粘性底部,降低了壁面剪应力。同时,下游场存在低速涡,进一步加厚粘性底部,降低壁面剪应力,这是摩擦阻力减小的原因。
1. 导言
自1970年以来,减阻技术一直是节能研究的重点,因此许多学者致力于这一领域的研究(Moore和Lowson,1995, Vukoslavceic et al,1992)。在船舶运动中,船舶表面的摩擦阻力占流体流动总阻力的50%,而在潜艇中,这一比例高达70%(Koeltzsch et al,2002)。在油气管道等长距离流体输送中,泵站提供的动力几乎全部用于克服流体的摩阻。在军事领域,降低飞机的摩擦阻力不仅可以提高飞机的耐久能力和航行速度,而且可以节约能源。在高层消防水炮中,降低炮筒与水之间的摩擦阻力,对挽救生命、保护财产、减少损失具有重要意义。经过数百万年的不断生物适应和不断进化,通过自我学习、自我重构和自我传播,不仅包括身体对外界介质表面的及时调整,而且通过长期进化形成了一个非常稳定的自适应系统,形成了生物表面结构(Lu,2004,Tong et al,1994)。在仿生减阻技术中,模拟生物进化过程以获得减阻特性,产生了很大的减阻效果。仿生减阻有非常重要的应用,例如利用槽面减阻来模拟鲨鱼,因为它的结构类似于鲨鱼的鳞状上皮(Viswanath, 2002, Wang et al., 2000, Bechert et al., 2000a, Bechert et al., 2000b)。同样,弹性表面减阻的使用也与海豚皮的弹性特性有关(Pavlov, 2006, Huang and Johnson, 2008, Fish, 2006)同时通过模仿昆虫,非光滑的表面也可以用来减阻(Lee and Jang, 2005, Gu et al., 2013, Tian et al., 2007)。
射流技术通过射流的反作用力和射流与输入流间相互作用产生的干扰力,为飞机提供姿态控制和直接执行机构力。同时,其响应时间短,在低飞行压力和低飞行速度下具有良好的控制性能。高超声速飞机减阻中引入了射流技术(Srivastava, 1998, Daso et al., 2009)。 Chen等人(2011)研究了两种喷雾压力比下不同射流模型的产生机理,分析了湍流机理对流场的影响。基于NASA SC(02)-0714超临界翼型,Yang等人(2012年)研究了利用激波控制膨胀控制超临界翼型减阻的跨音速翼型减阻问题。结果表明,在设计马赫数下,不同膨胀率的减阻效果为14~16%。为了解决反向射流压力要求大、攻角敏感等问题。蒋等人(2009年)提出了支撑侧向射流减阻技术。Meyer等人(2001年)Nelson(2001)对二维圆柱形进行了研究,指出反向冷流对减少表面热流和减阻具有积极的作用。Bushnell(2004年)对高超声速飞行器的研究表明,冲击波阻力约占巡航阻力的2/3,摩擦阻力约占总阻力的1/3。Eswar等人(2002年)在飞机和导弹上应用了反向射流减阻技术。Zhao等人(2012 a)建立了主速为20m/s的仿生表面模型和可扩展模型。不同直径的射流孔以不同的速度耦合。随后分析了表面阻力、不同压力之间的阻力和减阻比对表面阻力的影响。结果表明,在射流孔径为5mm时,最大减阻率为11.566%。
鲨鱼有非常快的移动能力,特别是在捕食的时候,深海鲨鱼的爆发速度可以达到10-20m/s。观察到鲨鱼的前体侧鳃是由两侧各有5-7个鳃缝的大面板组成。在游泳时,鲨鱼通过半张开的嘴吸入水,并从鳃中排出水以进行气体交换。这不仅影响呼吸过程,而且有助于减少运动阻力。在前人的研究中,重点研究了射流方向对仿生减阻效果的影响,并取得了较好的减阻效果(Zhao et al., 2010)。根据仿生研究的基本原理,对鲨鱼鳃的形态特征进行了简化,建立了仿生射流表面。在实验模型的这一表面上,对仿生射流的表面结构进行了处理。在自行研制的喷气减阻平台上,对其减阻特性进行了研究,并采用数值模拟方法对减阻机理进行了分析。
2. 实验分析
2.1. 实验设备
实验是在一个小型射流测试平台上进行的,该平台是一条充满水的闭环管道;转速马达驱动一个旋转轴,在加压舱内形成稳定的流场(Zhao et al., 2011)。泵以一定的速度为喷气机供水。该装置包括:(1)实验中测试流体摩擦力矩的转矩信号耦合器;(2)YVP系列交流变频三相异步电动机和E1000系列的1.5千瓦逆变器控制电机转速;(3)泵作为射流动力装置;(4)利用LabVIEW设计开发数据采集系统,实现数据流量控制,采集不同实验模型中摩擦力矩的值,实现实时数据的监测。
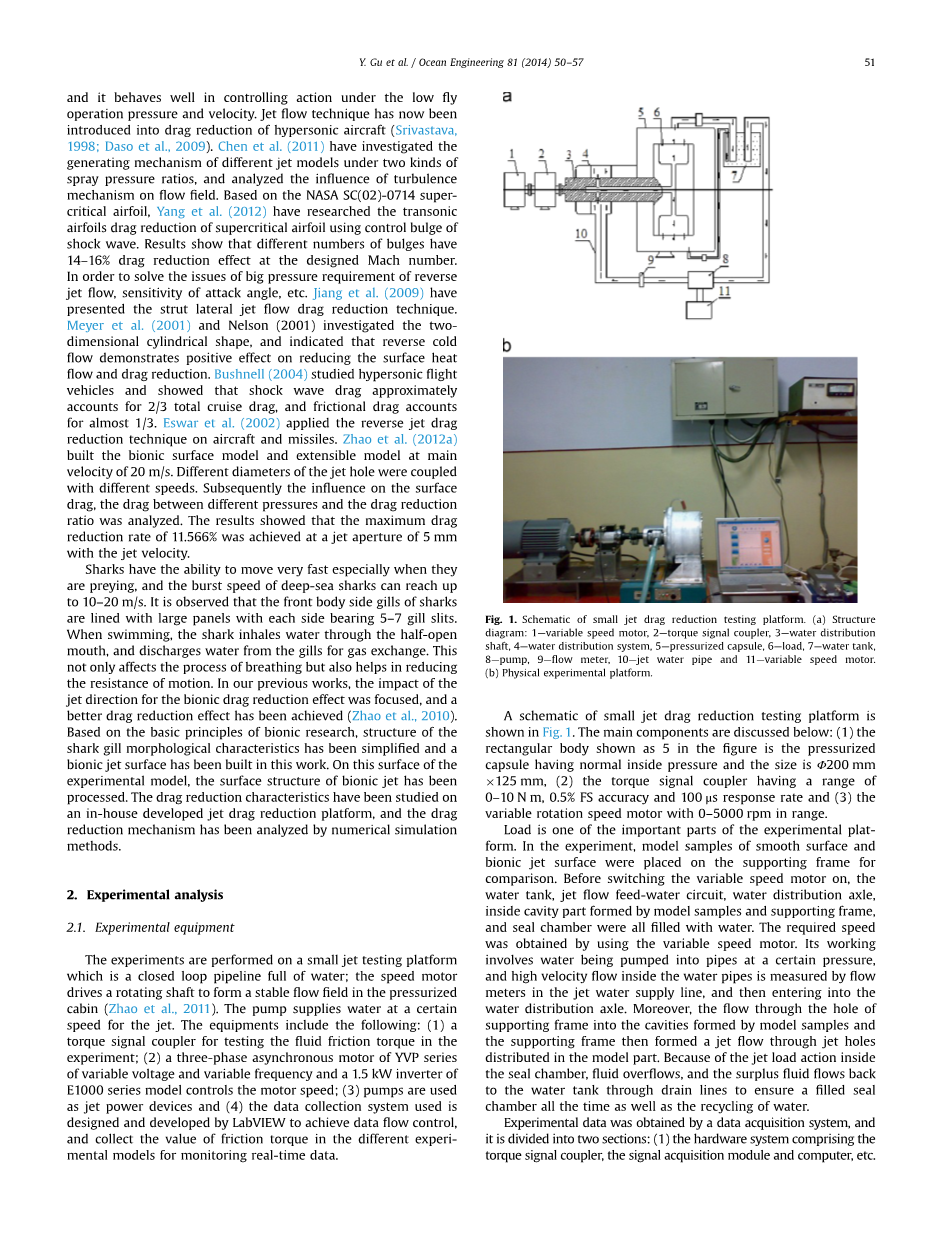
本文给出了一种小型喷气减阻试验台的原理图如图1。主要内容如下:(1)图中所示为5的矩形体为内压正常的加压胶囊,其尺寸为Phi;200 mm X 125 mm,(2)扭矩信号耦合器的范围为0-10 N M,0.5%FS精度和100 mu;的响应率以及(3)0-5000转速范围内的变速电机。
图1. 小型喷气减阻试验台原理图。(A)结构图:1变速电机、2扭矩信号耦合器、3水分配轴、4水分配系统、5加压舱、6负载、7水箱、8泵、9流量计、10喷射水管和11变速电机。(B)物理实验平台。
载荷是实验平台的重要组成部分之一。在实验中,将光滑表面和仿生射流表面的模型样本放置在支撑架上进行比较。调速电机开机前,水箱、射流给水回路、配水轴、模型样品和支撑架形成的内腔部分、密封室均充水。用变速电机获得所需转速。它的工作过程是在一定的压力下将水抽入管道,通过射流供水管线中的流量计测量水管内的高速流动,然后进入配水轴。此外,通过支撑框架孔的流动进入由模型样本和支撑框架形成的空腔,然后通过分布在模型部分的射流孔形成射流流。由于密封室内的射流负荷作用,液体溢出,剩余的流体通过排水管道回流到水箱,以确保密封室始终充满,以及水的循环利用。
实验数据由数据采集系统采集,分为两部分:(1)由转矩信号耦合器、信号采集模块和计算机等组成的硬件系统;(2)基于LabVIEW的软件系统。数据采集硬件系统的功能是将转矩信号耦合器输出的模拟信号转换为可识别和存储的数字信号。数据采集硬件系统采用应变芯片扭矩信号耦合器接收被测物理信号。将物理信号转换为被测电信号,最后利用hx-90f信号转换模块将环频率和转矩信号耦合器输出的脉冲信号转换为模拟信号,1-5V。 扭矩信号耦合器将采集到的物理信号转换为电压信号,并采用数据采集卡的模数转换功能,将电压信号转换为计算机识别和存储的数字信号。然后利用数据采集软件对采集到的信号进行恢复,并通过生成数据文件的方法将采集到的实验数据保存到计算机中。在实验过程中,在每个条件下获得了多组实验数据。最后,在采集到的数据文件中,选取一定数量的数据在中间(比较稳定)得到平均值,用于后续分析。
实验模块选用U-pvc管作为射流水管,管道的横截面直径和长度分别为:Phi;160 mmtimes;50 mm,各自为5 毫米厚。射流孔按照一定的规律沿周向和轴向分布加工,射流孔的排列为10孔(a=36°)在实验模型边缘均匀分布。轴侧有五排孔(10/行),因此孔的总数为50。轴向孔的第一排、第三排和第五排在同一条线上。在第二行和第四行,每两个洞都在同一条线上。由于射流孔结构的基本形式是等腰三角形单元,所以实验模块的直线与中心线之间的夹角为theta;=18°。第三行位于设备的中心。第一排到第五排的距离是20mm,而且在第一和第五行间的距离也是20mm。设置如图2。孔的直径分别是D=1 mm,2 mm,3 mm和4 mm。
图2. 实验模型:(A)结构示意图和(B)模型样本。
2.2. 工作原理和评估方法
当马达不启动或水没有密封在隔间时,没有摩擦力。首先要测量电机的摩擦力矩,以校正数据采集系统,并根据实验模型中的摩擦力矩来确定转矩值。验证完成后,电机停止工作,并通过底线将水注入密封室。当舱内充满水时,会有均匀的水从顶部流出。在此基础上,启动电机,并通过变频器调节电机转速以控制模型转速。当实验模型在水中旋转时,水的摩擦会将扭矩信号耦合器加压为反向转矩,并将该信号转换为频率信号。这将通过数据采集系统传送到计算机。最后,在LabVIEW开发的图形用户界面中显示了扭矩的实时曲线(Zhao et al., 2012b)。
数据每0.05s收集一次,总收集次数为300次。实验前,实验模型处于电机驱动的高速旋转运动状态,由于实验模型内部流体的存在,需要很短的时间才能达到指定的转速。为了避免影响实验过程的这些不稳定因素,获得稳定、真实的实验数据,数据采集从501开始,不包括前500次采集的数据。然后对不同实验模型下300组数据的平均值进行了计算和分析。分别对光滑表面的实验模型和不同射流直径的实验模型进行了扭矩测试。转速值n的10组数值如下:2600-3500 r/min,间隔均匀(100r/min),以及在正常水温下。
在旋转过程中,用以下公式从水的粘度中求出摩擦阻力f:
(1)
摩擦力矩公式为
(2)
这里的tau;, A, tau;i, Ai, sigma;, A⁎, sigma;i, A⁎i和dr分别为壁面剪应力、壁面面积、离散单元壁面剪应力、壁面离散单元面积、壁面应力、壁面流场方向投影面积、离散单元壁面应力、离散单元投影面积;alpha;和beta;代表带摩擦剪应力和压应力的臂角。
在比较了这些数据组后,按照以下公式计算了减阻率:
(3)
这里MS代表光滑表面模型中的摩擦力矩MJ代表射流表面模型中的摩擦力矩。
2.3. 实验结果与分析
在光滑表面和射流直径值下测试了转速为2600-3500毫米 r/min下摩擦力矩值D=1 mm,2 mm,3 mm,和4 mm。计算五组数据的平均值,得到减阻率。
图3给出了不同结构的实验模型的摩擦力矩曲线。如图3转速越快,摩擦阻力应力越大。另外,在旋转速度为2600-3000 r/min的情况下,具有光滑表面的实验模型的摩擦阻力应力小于仿生射流表面的摩擦阻力应力。在相同转速下D=2mm,实验模型获得了最大摩擦阻力应力。当n=3000 r/min,实验模型上的摩擦阻力应力更接近实验模型。光滑表面以及直径为1 mm,2 mm,3 mm和4 mm的实验模型的摩擦阻力分别是是2.782 N m,2.737 N m,2.785 N m,2.720 N m和2.744 N m。当转速超过3000 r/min,摩擦阻力应力在实验模型上的变化梯度增大,光滑表面实验模型的摩擦阻力应力大于仿生射流表面实验模型的摩擦阻力应力。在D=3mm的实验模型上,摩擦阻力应力的变化梯度小于其它模型。其原因是在相同的射流速度下,由于射流直径的不同,在单位时间内通过射流孔的流量是不同的,因此,大射流直径的实验模型具有较大的流量。在恒定射流速度下,大射流直径的实验模型在单位间隔内比小射流释放更多的流体以保持射流状态。而小射流直径的实验模型在单位间距内比大射流释放的流体少,射流损失小,但实验模型的表面射流强度较小,削弱了射流对壁面边界层的影响。最后提出了一种大的摩擦阻力。因此,射流直径既不可以太小,也不太大。
图3. 仿生射流表面和光滑表面不同射流直径的摩擦力矩曲线。
图4给出了不同转速仿生射流表面不同实验模型下的减阻速率曲线。如图4所示,当阻力增加仿生射流表面的减阻速率为负值。当转速小于3000 r/min,随着转速的不断增大,电阻的增加趋势逐渐减弱。尤其当D=2mm时 ,增加阻力的状态是最明显的。转速为3000 r/min,仿生射流表面呈现减阻状态,随着转速的进一步增大,减阻率逐渐增大。D=1mm的实验模型的减阻率变化平稳,其在最初增加后减小,当n=3400 r/min,减阻率达到4.72%的峰值;D=2 mm是最明显的,它首先增加,然后减少,然后增加,当n=3500 r/min,减阻率峰值为8.48%,减阻率变化梯度为D=3 mm,达到最大值,减阻率的变化趋势先增大后减小,当n=3400 r/min,减阻率达到9.38%,减阻率达到9.38%。D=4 mm变化平稳,逐渐增大,当n=3500 r/min,减阻率达8.31%。在分析的基础上图4在仿生射流表面表现出较好的减阻效果。D=3mm的实验模型的减阻效果经实验发现是最好的,而D=1mm是最差的。D=3 mm n=3400 r/min的条件下,仿生射流表面的减阻率达到9.38%的峰值
图4. 仿生射流表面不同射流直径的减阻速率曲线。
3. 数值模
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238133],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

