英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
新型五自由度混合串并联机械手空间的分析与优化
摘要:混合机械手在机械加工行业中具有潜在的应用,并且在高刚度和高灵活性基础上引起了许多研究人员的广泛关注。因此,为扩大混合机械手的应用前景,提出一种新型的五自由度(DOF)混合串并联机械手(HSPM)。首先,本文进行该机械手的设计方案介绍。其次,对该机械手进行详细的分析,包括运动学分析,静力学分析和工作空间分析。尤其是,在静力分析中使用了将过约束力/对设置为非过约束力/对的幅值等效方法。然后,使用三个性能指标来优化并联机构。其中两个已被广泛使用,第三个是考虑驱动力特性的新指标。基于性能指标,绘制了性能图集,并研究了永磁电机的优化设计。为达到并联机构的预期动力学特性,完成优化物理尺寸的验证,并基于优化物理尺寸执行工作空间,本文将为该新型串并联混合机制的应用奠定良好的理论基础,也可应用于其他混合机械手。
关键词:并行机构;性能指标;优化设计;性能图集
1 引言
自并联机构(PM)出现,并联机构已被广泛研究,因为与串行机制相比,他具有结构紧凑,刚度高, 承载能力高的特点[1][2]。在早期阶段,Klaus Cappel开发了首个飞行模拟器,该模拟器基于6自由度(Degree of Freedom,DOF)Gough-Stewart平台。此后,该设备已广泛用于航空,医疗和通信领域。作为并联机构的应用扩展,逐渐出现了移动性较低(2到5个自由度)的机械。低流动性的永磁体,由于其理想的特性(例如结构简单,运动耦合低,成本低和易于控制)而成为研究的热点[3][4][5]。例如,Xie等人[3],黄真等人[4]和Joshi等人[5],研究了不同类型的低迁移率并联机构的合成类型。Clavel等[6]发明了3自由度机器人——DELTA,是低移动性并联机构的成功应用案例。除此之外,最重要的低迁移率PM是具有一个平动自由度和两个旋转自由度(2R1T)的并联机构:Zhang等人[7]分析的3RPS PM就是典型的两个旋转自由度的并联机构(R,P和S分别代表旋转,棱柱和球形接头)。实际上,两个旋转自由度的并联机构在其旋转轴方面具有不同的属性。Huang 等人[8]分析了旋转轴的运动特性,对于2R1T PM的两个旋转自由度,PM的旋转轴可以分为两种类型:连续旋转轴(Continuous Rotation Axis,CRA)和瞬时旋转轴(Instantaneous Rotation Axis, IRA)。在此,CRA / IRA表示旋转轴。对于CRA,移动平台( Mobile Platform, MP)可以绕旋转轴连续旋转。对于IRA,移动平台只能以特定姿势绕着旋转轴旋转[9]。与普通的2R1T PM相比,具有两个CRA的2R1T PM更易于实现轨迹规划,参数校准和运动控制,从而具有多种应用前景。然而,只有少数类型的机械带有两个CRA的2R1T PMs,限制了这种机制的开发和工程应用。
在工业中,大多数复杂的空间表面(例如发动机叶片,螺旋桨叶片和核蒸发器头的表面)都需要五轴同时加工中心。因此,使用五个或六个自由度的并联机构是一个适当的选择,但是多自由度并联机构由多铰链和多链组成,在复杂的自身结构的影响下,多自由度永磁体的定向能力受到限制。并且还应注意高运动学耦合,复杂的动力学模型以及硬件控制。考虑到这些缺点,需要改进机器的结构。因此,基于2R1T PM的混合串并联操纵器(HSPM)可能是一种趋势,成为维持PM的高刚度和良好的灵活性以及较大的串联机构工作空间的折中方案[10][11]。例如,由Li[12]提出的5轴FSW(Fourier Series Window,傅里叶级数),是通过在2R1T PM 2SPR / RPS上串联2-DOF PP串行机构而安装的。
Tricept[13],Trivariant 5-DOF HSPM[14]和Exechon五轴加工中心[15]是通过将2 DOF摆动头连接到2R1T PM MP上而构成,分别表示为:3UPS / UP,2UPS / UP,和2UPR / SPR(U表示万向节)。
除PM的配置属性,优化设计也是一个热门话题[16][17][18]。一个成功的优化可以有效地改善运动/力传递和取向能力[[19][20][21]。文献[19]提到,对于混合自由度的并行机器人,可不使用雅可比矩阵的条件数和全局条件指数。因此,对于混合自由度的2R1T并行机构,建议的指数[19][20][21][22]独立于任何坐标系,更适合HSPM。上述PM的线性驱动单元基本上是滚珠丝杠系统,其摩擦力矩的波动将直接影响驱动系统的平稳性。一般而言,轴向载荷直接影响摩擦力矩。因此,驱动力的波动会影响摩擦力矩,并在实际应用中,影响机械运动特性及动态行为[23][24]。除了考虑运动/力传递和定向能力指标以外,还需要注意每个肢体中驱动力的稳定性。
本文介绍了一种新颖的5-DOF HSPM,其平行部分是过度约束的低迁移率2R1T PM。本文的其余内容安排如下:在第2部分,对5-DOF HSPM的设计计划和说明进行了详细说明。在第3部分,对该混合机械手进行了系统分析,包括运动学,静力学和工作空间分析。第4部分,报告基于三个指标的尺寸优化,包括传递能力,良好的定向能力和力稳定性。第5节中,提出结论。
2 新型空间五自由度HSPM
2.1新型五自由度HSPM的设计计划
Exechon五轴加工中心的核心部分是带有10个单自由度接头的2UPR / SPR PM,因此2UPR / SPR PM具有很高的刚度。基于这个原因,新型机械臂使用了具有9个单自由度接头的3-DOF 2RPU / UPR PM。这里需要指出的一点是,本文中的2RPU / UPR PM与参考文献[25]中的2RPU / UPR PM不同。实际上,MP和PM的基点相反,与3SPR和3RPS PM的区别一样。
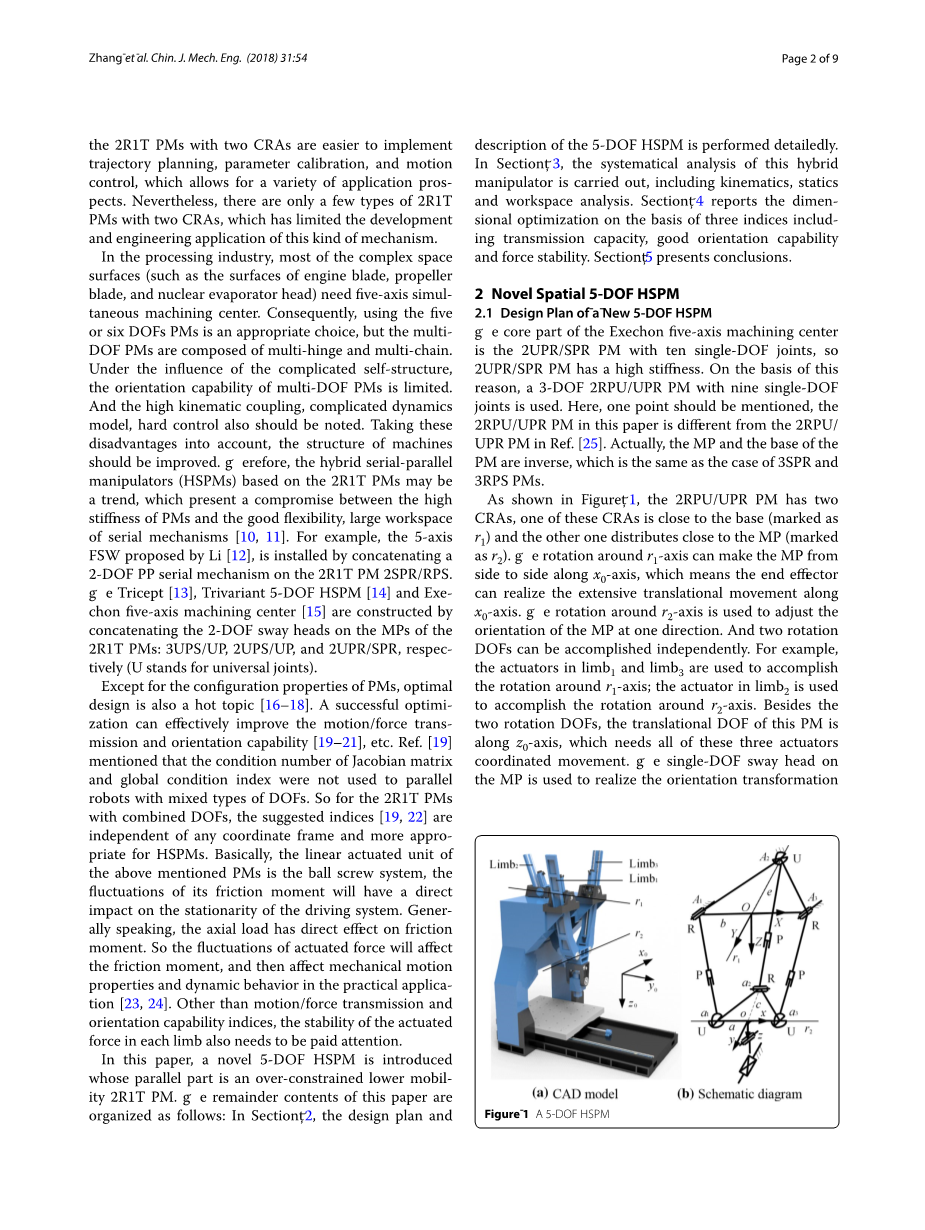
如图1所示,2RPU / UPR PM具有两个CRA,这些CRA中的一个靠近基点(标记为),另一个分布在MP附近(标记为)。围绕轴的旋转可使MP沿着轴左右移动,这意味着末端执行器可以实现沿轴的广泛平移运动。围绕轴的旋转用于在一个方向上调整MP的方向。并且两个旋转自由度可以独立完成。例如,肢体1和肢体3中的执行器用于完成围绕轴的旋转;肢体2中的执行器用于完成围绕轴的旋转。除两个旋转自由度外,三个执行器协调运动,使得此PM的平移自由度沿轴。MP上的单自由度摇摆头用于实现另一个方向的方向转换。底座上的平移台用于实现沿轴的广泛平移运动。因此,这种新颖的五自由度HSPM既有出色的定位能力,又有更大的旋转能力。
空间五自由度HSPM的3D模型如图1(a)所示,示意图如图1(b)所示。
图1 五自由度HSPM
2.2 5-DOF HSPM的配置说明
如图1(b)所示,平行部分的特征如下:每个U形接头内的两个轴的交叉点分别用,和表示;和是对应以和为沿着在P关节方向上基座的投影;是沿P关节方向在MP上的投影。
和是相似等腰三角形。
参考框架A:O-XYZ附着在基座上,其中X轴指向矢量,Y轴指向矢量,其中O是的中点。
移动框架a:o-xyz以x轴指向向量oa 3和y轴指向矢量的方式连接到MP-轴,其中o是的中点。
肢体1和肢体3是相同的RPU肢体(P代表驱动的棱柱形关节),它们被限制在平面中。肢体2是UPR肢体,限制在平面oO中,而平面oO始终垂直于平面。
对于两个RPU分支,R关节的轴平行于由连接到这些分支的U关节的轴所定义的平面,并且垂直于平面。
驱动P关节的平移方向垂直于R关节的轴。
连接到MP的两个U形接头的轴对齐。
对于UPR肢体,R关节的轴线平行于。
连接到基座的U形关节的轴线平行于肢体1和肢体3的R关节的轴线。
驱动P关节的平移方向垂直于R关节的轴线和U关节的相邻轴线。
对于单自由度摆头,其旋转轴始终平行于线。对于平移台,其平移方向沿。
3 混合机械手的分析
3.1 2RPU / UPR PM的自由度分析
下面,使用修订的Kutzbach-Gruuml;bler公式来计算2RPU / UPR PM的自由度。公式显示为[26]
(1)
其中M是自由度的数量,d是PM的等级,n是组件的数量,g是关节的数量,是关节自由度之和,是冗余约束的数量,zeta;是隔离的DOF的数量。
根据往复螺杆理论[27],可知2RPU / UPR PM的每个分支都存在约束力和约束对。在每个肢体中,约束力通过U形接头并平行于R形接头的轴线。约束对垂直于所有旋转轴。因此,约束对的方向是相同的,换言之,此PM具有一个共同的约束。
由于这些关节之间的关系在该PM的任意瞬时位置不变,因此约束力/耦合力都符合上述分析。然后,等式(1)中的参数可得为d= 6thinsp;minus;lambda;thinsp; = 5(lambda;是公共约束数),,,,=1,zeta;=0。将以上参数代入方程式(1)得到PM的自由度:M=3。对于这三个自由度,平移自由度沿Z轴。旋转自由度一个围绕Y轴;另一个围绕x轴。需要说明的是,Y轴为轴,x轴为轴,均为CRA。
3.2 2RPU / UPR PM的逆运动学分析
简单的逆运动学对机器控制有好处,因此有必要解决PM的逆运动学。众所周知,PM的逆运动学很简单,尤其是对于2R1T PM。因此,求解过程将相对容易,仅给出一些关键步骤。例如,齐次变换矩阵T可以通过三个变换得到:首先,沿着Z轴移动lambda;;然后,绕旋转theta;1;最后,绕的theta;2。所以齐次变换矩阵T可以描述为:
=Rot(Y,)Trans(0 0 )
=Rot(x,) (2)
其中c = cos(·),s = sin(·),即某一角度的余弦值正弦值缩写。
通过公式 ,可以获得参考框架中点ai的坐标。那么肢体长度可以表示为:
(3)
对于给定的姿势 ,肢长可以通过等式(3)获得。即解决PM的逆运动学。
3.3 2RPU / UPR PM的静力分析
在机械分析中,可以将实际工作负载转换为作用在点o上的等效力/扭矩,该力/扭矩可以表示为施加在MP上的中心力/扭矩(表示为,F/ T)。让约束力/耦合力定义是,约束力/耦合力方向矢量为。由于中心力/转矩是广义的外力/转矩,因此力的方向(转矩轴)可以是任意的。如图 剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238856],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 2.3港口吞吐量预测外文翻译资料
- 使用多标准移动通信分层遗传算法的阻抗 匹配网络的宽带优化外文翻译资料
- 移动RFID标签阅读与非重叠串联阅读器在输送带的应用外文翻译资料
- 利用数字图像进行的全场应变测量方法外文翻译资料
- 自然灾害中并发事件的多种应急资源的分配外文翻译资料
- 基于主机的卡仿真:开发,安全和生态系统影响分析外文翻译资料
- 实现基于Android智能手机的主机卡仿真模式作为替代ISO 14443A标准的Arduino NFC模块外文翻译资料
- 探索出行方式选择和出行链模式复杂性之间的关系外文翻译资料
- 信息系统研究、教育和实践的基本立场及其影响外文翻译资料
- 仓储和MH系统决策模型的设计优化与管理外文翻译资料

