
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于知识的利用AIS历史数据的船舶位置预测
Fabio Mazzarella, Virginia Fernandez Arguedas, Michele Vespe
European Commission - Joint Research Centre (JRC)
Institute for Protection and Security of the Citizen (IPSC)
Via Enrico Fermi 2749, 21020 - Ispra VA, Italy
Email: {fabio.mazzarella, virginia.fernandez-arguedas, michele.vespe}@jrc.ec.europa.eu
摘要:海上态势感知意识的提升,或者说了解事件的能力,其中包括对海洋环境产生影响的情况和活动,是时下最为重要的安全保障。扩大现有技术的覆盖范围,例如船舶自动识别系统(AIS),为整合和充实在海洋领域已有的服务和信息提供了可能性。在这种情况下,船舶位置的预测对于增强海上态势感知意识(MSA)和建立海事情境图片(MSP)是非常重要的。海事情境图片(MSP)指在所需求时间里坐落在特定兴趣范围(AOI)的船舶地图。实际海上交通路线信息在船只预测过程的集成,拥有优胜的潜力来提供一个更加准确的画面来告知我们海上到底发生了什么,并且它利用的是船舶定位的历史数据知识。在本文中,我们提出了一种基于颗粒过滤器(PF)的贝叶斯船只预测算法。该系统是基于交通路线知识,以提高船舶位置预测质量为目的。该算法的评估结果是利用真实的AIS数据在直布罗陀通道和多佛尔海峡之间的特定区域内完成的。
1 引言
来自例如像AIS[1]这样的自报系统的对海上位置数据的收集,虽然受到可靠性和操作性问题的影响,但是正在为MSA提供丰富的数据。尤其是,AIS对于部分船舶是强制安装的,包括在国际水域航行的300总吨及以上的船舶、不在国际水域航行的500吨及以上的货船以及客船[2]。此外,自2014年5月起,长度超过15米的欧盟所有渔船被要求必须配备AIS[3]。自报数据的信息内容,除了有状态向量等运动信息,还可以包括有关于船只的与航次有关的(如目的地,预计到达时间等)和静态(如船舶尺寸,船舶类型等)信息。为了进一步提升AIS系统作为全球跟踪手段的使用情况,现在AIS信息也可以从太空中获得,并且越来越多的基于卫星数据的提供商已经出现[4]。相对于的高持久性,但覆盖范围有限的AIS地面网络接收器,空基系统可以在远离海岸线的公海上收集信息。
对于涉及海洋环境监督的整个应用范围,MSA要求在所需的时间及一个AOI区内,持续维护MSP。MSP既带有身份、类型、目的地等附加信息的船舶位置地图。从几个报告系统输入的数据看,MSP的构建是包括异构数据采集和集成的多级工艺。它包括识别和维护独立船舶的运行轨迹以及在所需的参考时间内对船舶位置的预测[5], [6]。特别是,船舶位置预测是一个具有挑战性的任务,尤其是在开放海域。在这里,基于空间的AIS数据的获得带有顺序时间延迟且MSP需要具有一个恒定的增量时间。
在文献[7]和文献[8]中,作者开发了一种通过分析历史自报数据来提取海上船舶交通的地域网络表示的方法。这个方法可以通过在一个非常接近感兴趣区域的地方以及异常检测参考、情景预测和轨迹重建来表示交通路线。在文献[9]中,我们提出了基于知识(KB)的船舶位置预测技术。它是利用来自不同的定位数据提供商来提取海上交通信息来建立船舶运动模式模型(参考文献[7] 和文献 [8]中已发展出的方法)。在那里我们已经表明,该拟议的方法优于最普遍的等速模型(CVM)[5], [6], [10],并且它可以被有效地用于提高合成孔径雷达(SAR)船舶检测和自报数据之间的信息融合过程。
本文的目的是通过开发在贝叶斯非线性滤波[11]领域的标准算法和使用不同的定位数据提供商提取的海上交通信息来进一步改进文献[9]中的方法。特别是,我们参照文献[12],[13]的方法提出了一个KB微粒过滤器(KB-PF)。这个通过使用状态约束以提高跟踪性能的想法可以追溯到二十年前。伴随着在卡尔曼滤波中硬线性约束的开发[14],这个想法之后已应用到许多情况,例如道路约束目标跟踪[15],[16],[17],或沿岸跟踪[18]。
我们通过使用在直布罗陀通道和多佛尔海峡之间的特定区域中提取是我历史交通数据来应用该方法于实际情况之中,并且显示KB微粒过滤器方法优于文献[9]中所示的技术。另外一个基于AIS数据的奥恩斯坦-乌伦贝克随机过程船舶运动预测方法可以在文献[19]中找到。其它关于船舶运动预测的探索性努力的信息能够在文献[20]和[21]的上下文中找到。
本文的结构安排如下。第二节提供了该方法的详细说明,第三节将该方法应用到实际数据集之中,第四节为结论总结。
2 基于知识的船舶位置预测
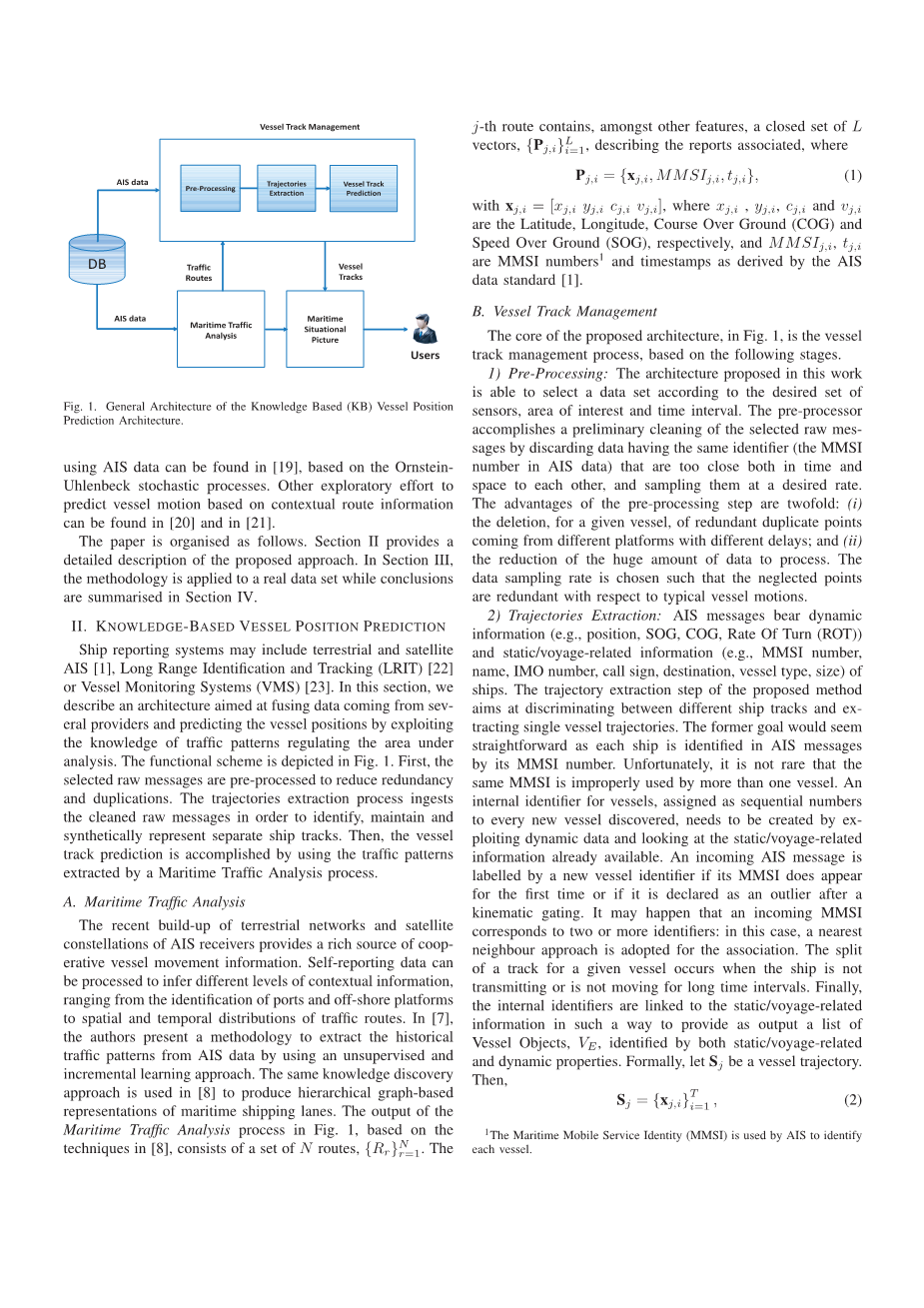
船舶报告系统可以包括地面和卫星AIS[1],远距离识别和追踪(LRIT)[22]或渔船监测系统(VMS)[23]。在这一章节中,本文阐释了一种体系结构,它的目的在于将多个供应商的数据进行融合并利用分析下的交通模式区域调节知识来预测船舶位置。功能图如图1所示。首先,对于选定的原始信息进行预处理,以减少冗余和重复。轨迹提取工艺要摄取清洁的原料信息以便识别、维护和综合表示不同船舶的轨迹。然后,船舶运行轨迹的预测是通过使用海上交通分析处理提取的交通模式来完成的。
图1 基于知识(KB)船只位置预测构架的通用体系结构
2.1 海事交通分析
近期建设的地面网络和AIS接收卫星基地提供了丰富的协同船舶运动信息的来源。被处理的自报数据可以用来推断从识别港口和海上平台到交通路线的空间时间分布的不同层次的文脉信息。在文献[7]中,作者提出了一种通过使用无监督和增量学习的方法从AIS数据中提取历史交通模式的方法。同样的知识发现方法在文献[8]中被使用来生产海上船舶路线的层次绘图表示。海上交通分析过程的输出如图1所示。它是基于文献[8]中的技术,并且由N条线路组成,。除其它特征外,第j条路线包含一个封闭的L矢量集合,来描述相关的报告。在这里
(1)
其中, ,,和分别是经纬度,地面航线(COG)和对地速度(SONG),然后,则是MMSI1编号和由AIS数据标准[1]衍生的时间戳。
2.2 船舶跟踪管理
在图1中所提出的体系结构核心,是基于以下的阶段的船舶轨迹管理过程。
⑴ 预处理:在本文中所提出的体系结构是能够根据需求的一组传感器,感兴趣区域和时间间隔来选择数据。预处理器通过丢弃在时间空间上过于接近对方的具有相同标识符(AIS数据中的MMSI编号)的数据,来完成所选原始消息的初步清洗,并以所需速率进行采样。预处理步骤的优点是双重的:① 删除给定船舶的来自带有不同延迟的不同平台的冗余重复点。② 减少了巨大的数据量的处理。数据采样速率被选择为使得被忽视的点是多余的相对于典型船只运动。选择数据采样速率使得相对典型船舶运动被忽视的点是多余的。
⑵ 轨迹提取:AIS信息包括船舶的动态信息(例如位置、SOG、COG、率转(ROT))以及静态和航行相关信息(例如MMSI编号、名称、IMO编号、呼号、目的地、船舶的类型、大小)。该方法的轨迹提取步骤的目的是鉴别不同船舶轨迹和提取单只船舶轨迹的不同。之前的目标看起来似乎很简单,因为每艘船舶可以由AIS信息中的MMSI编号来确定。不幸的是,那种相同MMSI编号被多个船舶使用的不当现象并不是罕见的。船舶的内部标识符,即鉴别每个新船的序列号,需要利用动态数据,并寻找已有的静态和航行相关的信息来创建。一个输入的AIS消息是将由最新的船舶标识符来标记,在新船的MMSI编号确实出现在第一时间,或者如果它在运动门控时间之后才被声明为局外人。一个输入的MMSI编号可能对应于两个或多个标识符:在这种情况下,学会采用的是最近邻方法。当船舶没有发送或在长时间内不动,对于给定船舶的轨迹分裂将会发生。最后,内部标识符将以这样的方式被链接到静止/航程相关的信息,来提供作为输出船只对象、、由静态/航程相关和动态信息来鉴定特性的列表。形式上,假设为船舶轨迹。并且,
(2)
其中,是描述在时间里船舶动力学系统状态向量,,,如在(1)中所规定。
⑶ 船舶轨迹预测:一个真正时间监视系统的目的是提供一个有恒定增量时间的MSP。然而,远离海岸的AIS消息广播无法到达接收者;卫星AIS数据会有一定延迟;或由于AIS报文的间歇性在一确定时间内没有任何消息。因此,估计船舶在特定时间里的位置、速度、朝向来满足MSP并为安全系统提供信息的需求越来越大。此外,当试图完成海上图片以填补缺失的信息并进行模式识别来检测低可能性的行为时,还需要非实时应用下的船舶状态估计。
图2 描绘了预测时间(TE)与AIS观测(点)之间的时间关系的影响船舶位置估计的可能出现的情况。Delta;t是T E和它最接近的观测点之间的时间差。
影响船舶位置估计准确度的可能情景如图2所示,其中表示船舶状态需要被估计的时间,∆ t是估计的时间和其最接近的可用的观测时间之间的时间间隔。当在连续两次观测时间之间时,(图2中的情景1),线性内插通常足以估计船舶位置。每当船只轨道不久前丢失或之后启动(情景2),基于线性运动模型的船舶位置前向估计(预测)和后向估计(再现)允许以可接受的可靠性来估计船舶状态。如果船舶退出由某一跟踪传感器所覆盖的区域,它的轨迹将被丢弃,然后需要通过(情景3),来预测该船舶的状态。同样地,如果在时间里,船舶轨迹尚未启动,那么该轨迹需要被改装到(情景4)。船舶轨迹呈现长间隙需要长间隔的插补(情景5)。估计(情景3,4)和预测(情景2)之间的差异,以及线性插值(情景1)和长间隔插补(情景5)之间的差异,是估算时间和它最接近的轨道点之间的范围内的∆ t时间差异。小∆ t可在数十分钟有顺序的公海,或在强烈路线措施的区域几分钟。此外,实时应用总是需求需求,而复古的新词语和插补更在离线应用程序中发生。在本文的其余部分,我们将只专注于重点对对较大∆ t的预测情况。然而,结果可以较为清晰地应用于其它情况。
|
算法1 KB预测伪代码(单循环) |
|
要求: |
|
1: |
|
2: FindClosestPoint |
|
3: |
|
4: RouteClassification |
|
5: for n = 1 to do |
|
6: if isempty() then |
|
7: CV M Prediction |
|
8: else |
|
9: KB Prediction |
|
10: end if |
|
11: end for |
|
12: |
在本文中,我们提出了一个在算法1中详述的单轨预测方法。它是利用在第II-A章节引入的海上交通网络为代表的上下文信息。具体地,算法1利用了由海上交通分析过程中提供的N条线路,。为了简化符号,我们将省略术语中的索引j来表示第j个轨道的状态向量。(例如,本文使用S来代替)。
首先,我们初始化系统状态为,可在最接近预测时间的时间里观察;∆ t表示与的时间间隔。本文通过时间步长将状态传播到预测时间,这样(是一个方便选择的时间增量)。所分析的整个轨迹在分类处理中使用,来决定其是否可以被分配给海上运输分析过程中所提供的某一条线路。此分配,如文献[9]中所述,我们使用了广泛用于分类的非参数算法[24] k-最近邻(kNN)算法。在众文献中所知,kNN通过在训练集中的k个最近邻的大量标签来对每个未标记的例子进行分类。这个过程通过使用可用的线路作为训练集应用于每一个考虑轨迹下的观察。kNN性能关键取决于用于识别近邻的距离度量。本文的算法采用马氏距离度量,即计算两个通用的状态向量和之间的平方距离,如下所示。
(3)
其中是半正定矩阵。本文方法使用了大间隔最近邻居(LMNN)技术来通过使用半定规划从训练集学习矩阵C,如文献[25]中所描述。已经证实,该学习算法比欧几里德度量距离产生较低的kNN错误率。kNN算法的精度取决于参数k和的选择。前者,代表要被搜索的观测邻居数量。它可通过众所周知的对折交叉验证过程[26]进行启发式估计。后者代表被k近邻搜索提供的接受点使用的的验证门限的延伸。它可以根据接受区域的所需置信水平进行统计选择。k和C的学习出现脱机,并且分类处理并不限制所提出的架构的实时实现。对于我们的具体问题,我们可以用非线性方
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[150331],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 2.3港口吞吐量预测外文翻译资料
- 使用多标准移动通信分层遗传算法的阻抗 匹配网络的宽带优化外文翻译资料
- 移动RFID标签阅读与非重叠串联阅读器在输送带的应用外文翻译资料
- 利用数字图像进行的全场应变测量方法外文翻译资料
- 自然灾害中并发事件的多种应急资源的分配外文翻译资料
- 基于主机的卡仿真:开发,安全和生态系统影响分析外文翻译资料
- 实现基于Android智能手机的主机卡仿真模式作为替代ISO 14443A标准的Arduino NFC模块外文翻译资料
- 探索出行方式选择和出行链模式复杂性之间的关系外文翻译资料
- 信息系统研究、教育和实践的基本立场及其影响外文翻译资料
- 仓储和MH系统决策模型的设计优化与管理外文翻译资料

