译文出处:Grisetti G , Stachniss C , Burgard W . Improved Techniques for Grid Mapping With Rao-Blackwellized Particle Filters[J]. IEEE Transactions on Robotics, 2007, 23(1):34-46.
用Rao-Blackwellized粒子滤波器建立栅格地图的改进技术
摘要:最近,Rao-Blackwellized粒子滤波器被引入作为解决SLAM问题的有效手段。这种方法使用粒子过滤器,其中每个粒子携带单独的环境地图。因此,关键问题是如何减少粒子的数量。在本文中,我们提出了用于在Rao-Blackwellized粒子滤波器中减少粒子数量的自适应技术,用于学习栅格地图。我们提出了一种计算准确的提议分布的方法,不仅考虑机器人的运动,而且考虑最近的观察。这大大降低了机器人在滤波器预测步骤中的姿态的不确定性。此外,我们提出了一种方法,可以选择性地进行重采样操作,从而显著减少粒子耗尽的问题。在大型室内环境以及室外环境中使用真实移动机器人进行的实验结果说明了我们的方法相对于先前方法的优越性。
关键字:SLAM, Rao-Blackwellized粒子滤波器, 自适应重采样, 运动模式, 改进提案
一、前言
构建地图是移动机器人的基本任务之一。 在文献中,移动机器人建图问题被称为同时定位和建图(SLAM)问题。 它被认为是一个复杂的问题,因为本地化机器人需要一致的地图并且为了获取地图,机器人需要对其位姿进行良好的估计。 位姿和地图估计之间的这种相互依赖性使得SLAM问题变得困难并且需要在多维空间中寻找解决方案。
Murphy,Doucet及其同事介绍了Rao-Blackwellized粒子滤波器作为解决SLAM问题的有效手段。 Rao-Blackwellized方法的主要问题是算法的复杂性是依据构建精确地图所需的粒子数量来衡量的。 因此,减少粒子数量是此类算法的主要挑战之一。此外,重采样步骤可能潜在地消除正确的粒子。 这种效应也称为粒子耗尽问题或粒子贫困。
在这项工作中,我们提出了两种方法来大幅提高Rao-Blackwellized粒子滤波器的性能,并用于解决带栅格地图的SLAM问题:
提议分布,考虑机器人传感器的准确性,并允许我们以高度准确的方式绘制粒子。
一种自适应重采样技术,可保留合理的多种粒子,并以此方式使算法能够学习精确的地图,同时降低粒子耗尽的风险。
通过评估由结合了测距信息的扫描匹配程序获得的与粒子有关的最可能位姿的可能性来计算提议分布。通过这种方式,最近的传感器测量被考虑用于创建下一代粒子。这允许我们根据比仅基于测距信息获得的更加灵活(并且因此更准确)的模型来估计机器人的位姿。使用这种精致的模型有两个影响。由于在考虑其对机器人位姿的影响后将当前观察结合到个体地图中,因此该地图更准确。这显著降低了估计误差,因此需要较少的粒子来表示后验概率。第二种方法,即自适应重采样策略,允许仅在需要时执行重采样步骤,并且保持合理的粒子多样性。这使得粒子耗尽的风险显著降低。
本文介绍的工作是我们之前工作的延伸[14],因为它进一步优化了提议分布,以便更准确地绘制下一代粒子。 此外,我们还增加了复杂性分析,对所用技术的形式描述,并在本文中提供了更详细的实验。 我们的方法已经在大规模的室内和室外环境中通过一系列系统实验得到了验证。 在所有实验中,我们的方法生成高度精确的度量图。 另外,所需粒子的数量比先前方法低一个数量级。
本文的结构如下。 在解释了一般如何使用Rao-Blackwellized滤波器来解决SLAM问题之后,我们在第III节中描述了我们的方法。然后在第IV节中提供了实施细节。 在真实机器人上进行的实验见第六节。最后,第七节讨论了相关的方法。
二、使用RAO-BLACKWELLIZED粒子滤波器进行建图
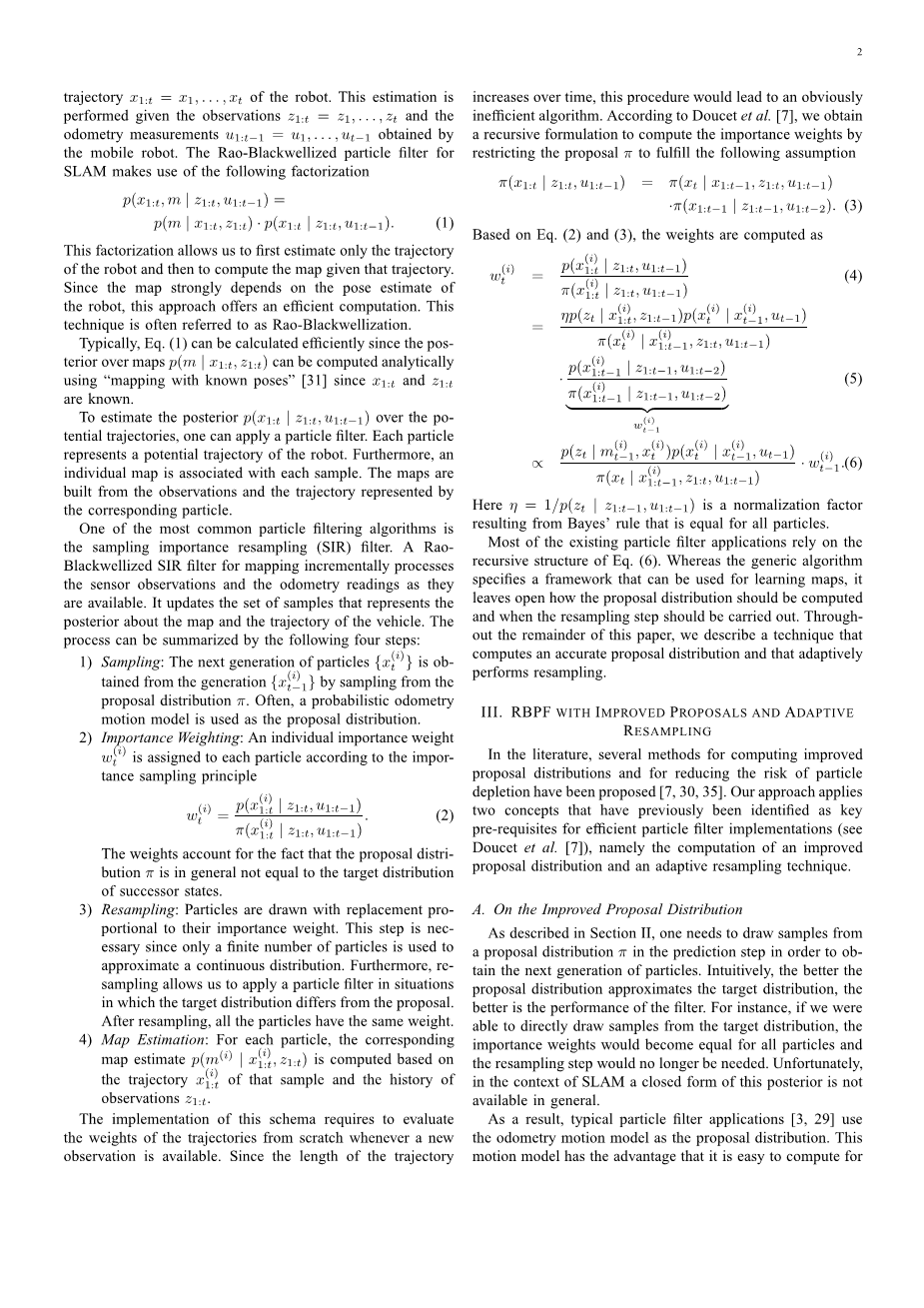
根据Murphy,用于SLAM的Rao-Blackwellized粒子滤波器的关键思想是估计关于地图m和机器人位姿 = ,...,的联合分布p(,m |,)。 在给定观测值 =,...,和由移动机器人获得的里程计测量值 = ,...,的情况下执行该估计。 用于SLAM的Rao-Blackwellized粒子滤波器使用以下因子分解
P(,m |,)=p(m|·P(|,). (1)
这种因式分解允许我们首先仅估计机器人的位姿,然后计算给定该位姿的地图。 由于地图强烈依赖于机器人的位姿估计,因此该方法提供了有效的计算。 这种技术通常被称为Rao-Blackwellization。
通常公式(1)可以有效地计算,因为地图的后验概率p(m|可以使用“已知姿态建图”分析计算,因为和已知。
为了估计潜在位姿上的后验概率P(|,),可以应用粒子滤波器。 每个粒子代表机器人的潜在位姿。 此外,单个地图与每个样本相关联。 地图是根据观察结果和相应粒子表示的位姿建立的。
最常见的粒子滤波算法之一是采样重要性重采样(SIR)滤波器。 用于建图的Rao-Blackwellized SIR滤波器可逐步处理传感器观测值和里程表读数(如果可用)。 它会更新代表地图后验概率和机器人位姿的样本集。 该过程可以通过以下四个步骤进行总结:
1)采样:通过从提议分布pi;采样,从代{}获得下一代粒子{}。 通常,概率里程计运动模型用作提议分布。
2)重要性加权:根据重要性抽样原则为每个粒子分配个体重要性权重
. (2)
权重考虑了提议分布pi;通常不等于后继状态的目标分布的事实。
3)重新取样:粒子的绘制与其重要性重量成比例。 该步骤是必要的,因为仅使用有限数量的粒子来近似连续分布。 此外,重新采样允许我们在目标分布与提议不同的情况下应用粒子滤波器。重新采样后,所有粒子具有相同的权重。
4)地图估计:对于每个粒子,基于该样本的位姿和观察历史计算相应的地图估计p()。
该模式的实现需要在新的观察可用时从头开始评估位姿的权重。 由于位姿的长度随着时间的推移而增加,因此该过程将导致明显低效的算法。 根据Doucet等人的说法,我们通过限制提议pi;以满足以下假设,获得递归公式来计算重要性权重
pi;(|,)= pi;(|,)·pi;(|,). (3)
基于公式(2)和(3),权重计算为
这里是由贝叶斯规则得到的归一化因子,其对于所有粒子是相等的。
大多数现有的粒子滤波器应用都依赖于公式(6)的递归结构。 虽然通用算法指定了可用于学习地图的框架,但它保留了应如何计算提案分布以及何时应执行重采样步骤的开放性。 在本文的其余部分中,我们描述了一种计算准确的提案分布并自适应地执行重采样的技术。
三、RBPF提出了改进建议和自适应重新编制
在文献中,已经提出了几种计算改进的提议分布和降低粒子耗尽风险的方法[7,30,35]。 我们的方法应用了两个先前已被确定为有效粒子滤波器实现的关键先决条件的概念(参见Doucet等人[7]),即改进的提议分布和自适应重采样技术的计算。
A.关于改进的提案分配
如第II部分所述,需要在预测步骤中从提议分布pi;中提取样本,以便获得下一代粒子。 直观地,提议分布近似于目标分布越好,过滤器的性能越好。 例如,如果我们能够直接从目标分布中抽取样本,则所有粒子的重要性权重将变得相等,并且将不再需要重新采样步骤。 不幸的是,在SLAM的背景下,这种后验的封闭形式通常是不可用的。
因此,典型的粒子滤波器应用[3,29]使用测距运动模型作为提议分布。 该运动模型的优点在于,对于大多数类型的机器人来说,它易于计算。 此外,然后根据观察模型p(z t | m,x t)计算重要性权重。用运动模型p(x t | x t-1,u t-1)替换公式(6)中的pi;,这变得清晰。
然而,该提议分布是次优的,尤其是当传感器信息比基于测距的机器人的运动估计更精确时,这通常是配备有激光测距仪的机器人(例如,具有SICK LMS的情况)。)。 图1示出了观察似然的有意义区域基本上小于运动模型的有意义区域的情况。 当在这种情况下使用里程计模型作为建议分布时,各个样本的重要性权重可以彼此显着不同,因为在观察模型下只有一小部分绘制样本覆盖了具有高可能性的状态空间区域。 (图1中的区域L(i))。 结果,需要相当多的样本来充分覆盖具有高观察可能性的区域。
图1. 运动模型的两个组成部分。 在区间L(i)内,在使用精确传感器的情况下,两个函数的乘积由观察似然性支配。
一种常见的方法 - 特别是在定位中 - 是使用平滑似然函数,这避免了接近有意义区域的粒子得到的重要性太低。 然而,这种方法丢弃了传感器收集的有用信息,并且至少根据我们的经验,往往导致SLAM上下文中不太准确的建图。
为了克服这个问题,可以在生成下一代样本时考虑最近的传感器观测z t。 通过将z t整合到提议中,可以将采样集中在观察可能性的有意义区域上。 根据Doucet [5]的说法,分布
是关于粒子权重方差的最优建议分布。 使用该提议,权重的计算变为
当对配备有诸如激光测距仪的精确传感器的移动机器人进行建模时,使用这种改进的提议是方便的,因为激光测距仪的精度导致极高的似然函数。 在基于地标的SLAM中,Montemerlo等人。 [26]提出了一个Rao-Blackwellized粒子滤波器,它使用了改进方案的高斯近似。 使用估计机器人姿势的卡尔曼滤波器为每个粒子计算该高斯。 当地图由一组特征表示并且如果假设影响特征检测的误差是高斯分布时,可以使用该方法。 在这项工作中,我们将计算改进建议的想法转移到使用密集栅格地图而不是基于地标的表示的情况。
B.改进提案的有效计算
当使用栅格地图对环境建模时,由于观察似然函数的不可预测的形状,因此不能直接获得知情提议的封闭形式近似。
理论上,使用适应的粒子滤波器[35]可以获得知情提议的近似形式。在这个框架中,每个粒子的提议是通过计算方程式(9)中给出的最优提议的抽样估计来构建的。在SLAM上下文中,首先必须从运动模型p(x t | x(i)t-1,u t-1)对机器人的一组潜在姿势x j进行采样。在第二步中,需要通过观察可能性对这些样本进行加权以获得最佳提议的近似值。然而,如果观察似然性达到峰值,则必须从运动模型采样的姿势样本x j的数量很高,因为需要密集采样来充分捕获通常较小的高可能性区域。这导致与使用运动模型作为提议类似的问题:需要大量样本来充分覆盖分布的有意义区域。
我们的观察之一是,在大多数情况下,目标分布仅具有有限数量的最大值,并且它大多只有一个。 这允许我们采样仅覆盖这些最大值周围区域的位置x j。 忽略分布中不太有意义的区域节省了大量的计算资源,因为它需要较少的样本。 在这项工作的前一版本[14]中,我们将p(x t | x(i)t-1,u t-1)近似于区间L(i)内的常数k(参见图1)
图2. 通常在建图期间观察到的粒子分布。 在开放的走廊中,粒子沿着走廊分布(a)。 在死胡同走廊中,所有方面的不确定性都很小(b)。 获得这样的后验是因为我们在对下一代粒子进行采样时明确地考虑了最近的观察结果。 与此相反,原始的测距运动模型导致较少的尖峰后验(c)。
在我们当前的方法中,我们考虑该区间L(i)内的两个分量,观测似然和运动模型。 我们在扫描配准过程报告的似然函数的最大值附近局部近似后验p(x t | m(i)t-1,x(i)t-1,z t,u t-1)。
为了有效地绘制下一代样本,我们基于该数据计算高斯近似N. 与先前方法的主要区别在于我们首先使用扫描匹配器来确定观察似然函数的有意义区域。 然后,我们在该有意义的区域中进行采样,并根据目标分布评估采样点。 对于每个粒子i,分别针对区间L(i)中的K个采样点{x j}确定参数mu;(i)t和Sigma;(i)t。 我们在计算平均mu;(i)和方差Sigma;(i)时还考虑了测距信息。 我们估计高斯参数为
与归一化因子
通过这种方式,我们获得了最优提议的闭合形式近似,使我们能够有效地获得下一代粒子。 使用此提议分布,权重可以计算为
注意,eta;(i)是用于计算等式(17)中的提议的高斯近似的相同归一化因子。
C.关于改进提案的讨论
本节中介绍的计算使我们能够单独确定每个粒子的高斯提议分布的参数。 该提案考虑了最新的测距读数和激光观察,同时允许我们进行有效采样。 与使用测距运动模型的情况相比,所得到的密度具有低得多的不确定性。 为了说明这一事实,图2描绘了用我们的方法获得的典型粒子分布。 如果是直的无特征走廊,样本通常沿着走廊的主方向展开,如
全文共16410字,剩余内容已隐藏,支付完成后下载完整资料

英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[710]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 2.3港口吞吐量预测外文翻译资料
- 使用多标准移动通信分层遗传算法的阻抗 匹配网络的宽带优化外文翻译资料
- 移动RFID标签阅读与非重叠串联阅读器在输送带的应用外文翻译资料
- 利用数字图像进行的全场应变测量方法外文翻译资料
- 自然灾害中并发事件的多种应急资源的分配外文翻译资料
- 基于主机的卡仿真:开发,安全和生态系统影响分析外文翻译资料
- 实现基于Android智能手机的主机卡仿真模式作为替代ISO 14443A标准的Arduino NFC模块外文翻译资料
- 探索出行方式选择和出行链模式复杂性之间的关系外文翻译资料
- 信息系统研究、教育和实践的基本立场及其影响外文翻译资料
- 仓储和MH系统决策模型的设计优化与管理外文翻译资料

