
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
自动化存储/检索系统的模型预测控制
摘要:离散事件系统经常出现在制造领域,但由于这些系统的特点,模型预测控制(MPC)不常用于它们。本文通过使用混合逻辑动力学(MLD)建模来实现自动存储/检索系统(AS/RS)的MPC。命题演算用于将AS/RS的非线性动态模型方程和约束转换为MLD形式。我们考虑一个性能指标,确保客户需求尽快且尽可能高效地得到满足。MLD模型和性能指标被重新定义为整数线性规划问题。一个案例研究是在实验室堆垛机上进行的,仿真结果说明了控制算法的良好性能。
关键字:控制应用,制造系统,生产过程,仓库自动化,自组织存储,基于模型的控制,预测控制,离散事件系统,整数编程
1.引言
多年来,由于生产流程的复杂性以及更严格的规章制度,大多数行业的要求越来越高。这些细化的过程需要精确的控制模型预测控制(MPC)(Camacho和Bordons,1997)是目前在过程工业中广泛使用的一种控制方法,因为它已被证明能够处理复杂系统(Qin and Badgwell,2003)。这是由于MPC能够重新制定控制问题转化为优化问题,从而有机会明确增加控制输入和受控变量的约束条件。
尽管如此,模型预测控制器主要用于连续变化的系统,并且不常用于离散事件系统。这就是为什么在制造领域,MPC几乎不被使用。考虑到制造业的高速发展,这是相当令人惊讶的性能和效率是必需的(Flegel,2014)。Vargas-Villamil和Rivera(2000)研究了MPC在制造领域的一些应用,侧重于MPC在半导体生产线中的应用。
MPC在离散事件系统中的稀缺使用可以用这些事实来解释,即这些系统以整数或布尔决策变量为特征(Xi et al。,2013)。 对于离散事件系统而言,大型组合优化问题通常需要在线解决,因为这些变量被视为计算瓶颈。
先进制造领域中使用的一种特定类型的系统是自动化存储/检索系统(AS/RS)(Lee,1997)。AS/RS的引入改善了库存管理和控制,增加了存储容量和可靠性,并减少了不必要的人工成本。AS/RS的主要组成部分之一是存储/检索起重机,用于拾取和丢弃物品。研究表明,解决AS/RS控制问题的方法有很多,例如,Roodbergen和Vis(2009)提到了几种存储分配方法,Bessenouci et al.(2012)侧重于估算起重机的行程时间。
AS/RS的控制复杂程度与系统的仓库数量和存储策略有关。许多论文使用随机存储策略,允许托盘要随机存储在任何可用的存储位置。由于这种策略的灵活性,可能的解决方案数量会增加,从而导致更高的复杂性以最优地解决存储分配问题。许多研究人员用启发式方法解决了这个问题(Han等,1987;Mahajan等,1998;Dooly和Lee,2008;#39;Avila等,2015)。Gharehgozli等人描述了解决专用存储策略的问题。(2014),与随机存储策略相反,专用存储策略为每个存储策略预先定义了唯一的存储位置存储请求。Gharehgozli等人(2014年)表明,这个问题可以通过使用起重机总是返回仓库的事实在多项式时间内解决。
在本文中,提出了一种不同的方法来通过随机存储策略来控制AS/RS。由于MPC具有许多优点,因此希望将其用于控制AS/RS。本文通过将系统描述为混合逻辑动力学(MLD)系统,克服了MPC在AS/RS中的复杂应用。向MLD系统的转换给出了控制问题可以表示为混合整数规划问题的优点。(Du等人,2009;Beccuti等人,2005;Groot等人,2013)之前已经应用了MLD-MPC组合,但据我们所知,仅有少数应用于离散事件制造系统已有报道(Cataldo和Scattolini,2014;Cataldo等,2015),而且从未用于AS/RS。
本文的结构安排如下:第2节给出堆垛机的描述。接下来,第3节描述了动力学模型及其约束条件,其次是MLD-MPC问题第4节。接下来,第5节讨论了一个案例研究的结果,第6部分提出了结论和建议。
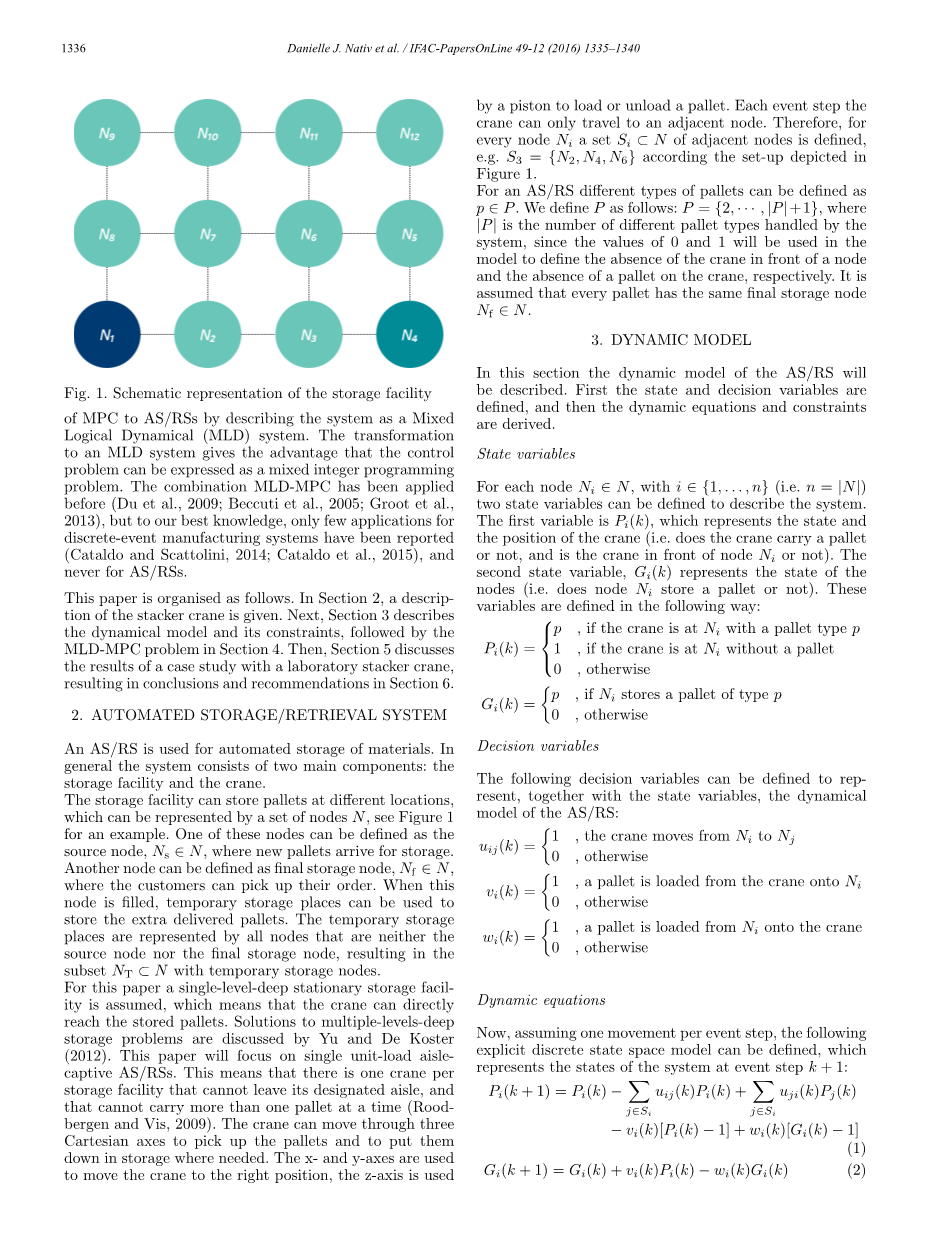
图1 储存设施的图解表示
2.自动存储/检索系统
AS/RS用于材料的自动存储。一般来说,该系统由两个主要部分组成:存储设备和起重机。
存储设备可以将托盘存放在不同的位置,这可以由一组节点N来表示,参见图1的示例。其中一个节点可以定义为源节点Nsisin;N,新托盘到达仓库。另一个节点可以定义为最终的存储节点,Nfisin;N,客户可以在那里拿到他们的订单。当这个节点被填满时,可以使用临时存储位置来存储额外交付的托盘。临时存储所有节点都不是源节点还是最终存储节点,从而导致子集NTisin;N与临时存储节点。
对于这篇论文,假设一个单层深度固定式存储设施,这意味着起重机可以直接到达存储的托盘。Yu和DeKoster(2012)讨论了解决多级深存储问题的方案。本白皮书将重点讨论单个单元负载的AS/RS。这意味着每个存储设备有一台起重机不能离开其指定通道,并且一次不能携带一个以上的托盘(Roodbergen and Vis,2009)。 起重机可以通过三个笛卡尔坐标轴来拾取托盘并放置它们在需要的地方存储。x轴和y轴用于将起重机移动到正确位置,z轴用于装载或卸载托盘。每个事件步骤起重机只能前往相邻节点。因此,对于每个节点Ni一组SiN个相邻节点被定义,例如,S3={N2,N4,N6}根据图1中所示的设置
对于AS/RS,可以将不同类型的托盘定义为pisin;P.我们将P定义如下:P = {2,...,| P | 1},其中| P |是由系统处理的不同托盘类型的数量,因为0和1的值将被用于模型中以分别定义节点前没有起重机和起重机上没有托盘。假设每个托盘具有相同的最终存储节点Nfisin;N.
3.动态模型
在本节中,将描述AS/RS的动态模型。首先定义状态和决策变量,然后导出动态方程和约束。
状态变量
对于每个节点Niisin;N,与iisin;{1,。。。 ,n}(即n = | N |)可以定义两个状态变量来描述系统。第一个变量是Pi(k),它表示起重机的状态和位置(即,起重机是否携带货盘,并且是否在节点Ni前面的起重机)。第二状态变量Gi(k)表示节点的状态(即,节点Ni是否存储托盘)。这些变量按以下方式定义:
如果起重机上有托盘类型p处于Ni位置
如果起重机在Ni位置没有托盘
否则
如果N存储类型p的托盘
否则
决策变量
可以定义下列决策变量来与状态变量一起表示AS/RS的动态模型:
动态方程
现在,假设每个事件步骤有一个移动,可以定义下面的显式离散状态空间模型,它表示在事件步骤k 1处系统的状态:
等式(1)表明有四种不同的事件可以在下一个时间步骤Pi(k 1)中将系统的状态Pi(k)改变为不同的状态:
bull;起重机从Ni移动到Nj,因此Pi(k)ge;1,Pj(k)=0,并且uij(k)=1。
bull;起重机从Nj移动到Ni,因此Pi(k)=0,Pj(k)ge;1,uji(k)=1。
bull;活塞将起重机上的托盘装载到Ni上,因此Pi(k)ge;2,并且vi(k)=1。
bull;活塞将Ni从托盘上装载到起重机上,因此Pi(k)=1,wi(k)=1。
(1)的正确性可以说明如下。如果在事件步骤k处起重机停留在原地并且将起重机上的货盘装载到节点Ni上,则(1)将减少到Pi(k 1)=Pi(k)-vi(k)[Pi(k)-1],因为动态方程的所有其他项都等于零。由于起重机位于Ni前面并且装有一个p型托盘,Pi(k)=p。将托盘移动到节点上需要vi(k)=1,根据动态方程,导致下一个状态Pi(k 1)=1。这意味着在事件步骤k 1时,起重机仍处于节点Ni的前面,但没有托盘,这与第3节开始时给出的Pi(k)的定义一致。方程(2)受到类似的影响。如果起重机移动而活塞不移动,则节点的状态不会改变:Gi(k 1)=Gi(k)。但是,如果活塞移动,节点的状态会发生变化。
交付和需求
对于源节点和最终存储节点动态方程(2)适用,但需要考虑一些额外的规则。源节点处新托盘的到达是预定义的,例如,统一分配。每个事件步骤最多一个托盘到达。当节点Ns为空时,即G1(k)=0时,取决于托盘的类型,新托盘到达Ns和G1(k 1)=p。当G1(k)ne;0时,应用动态方程(2)来确定G1(k 1)。客户需求D在P上均匀分布,影响最终存储节点Nf。当满足需求时,在步骤k的最终存储节点Nf的状态为Gf(k)=D(k),接下来,客户将从最终存储节点中移除托盘,并且因此Gf(k 1)=0。当顾客需求不满意时,Gf将根据动态方程(2)计算。
约束
下面的约束,描述了系统的限制,并适用于每个Niisin;N:
bull;每个时间步k只能发生一个事件:
bull;如果起重机不在节点Ni处,起重机不能从节点Ni移动到节点Nj:
bull;如果起重机没有放置在Ni前面,没有托盘或节点已经有货盘,则托盘不能从起重机装载到节点Ni上:
其中or;表示析取。
bull;如果起重机不在Ni的前面,已经装有货盘或Ni没有托盘,托盘不能从节点Ni装载到起重机上:
请注意,(4),(5)和(6)会导致非线性约束。Hoewever,这些约束可以通过使用命题演算以线性方式重新表达(Raman和Grossmann,1992;Cavalier等,1999)。为此创建了额外的辅助变量,如下所示。
例如,通过向模型添加布尔辅助变量,delta;i(k),(4)被重新表达,得到以下表达式:
为了便于今后阅读,在这个例子中,
以下两条命题规则被用来解释约束条件(Bemporad和Morari,1999)。
命题1假设xisin; X,其中X是一个给定的有界集合,和ε都是一个非常小的正数,从而得到以下声明:
[f(x)le;0]→[delta;=1]当且仅当f(x)ge;ε (m-ε)?.让字面Xi代表真或假的陈述,例如xge;1.可以将一个字面Xi与布尔(辅助)变量相关联delta;iisin;{0,1}。如果Xi为真,那么delta;i=1,否则delta;i=0。
命题2以下表达式和线性约束可以看作是等价的:
X1→X2相当于delta;1-delta;2le;0。由于minkPi(k)=0,所以Pi(k)=0→delta;i(k)=1相当于Pi(k)le;0→delta;i(k)=1。注意,后一个公式现在以正确的形式用于命题1的命题规则。这导致需要将第一组约束添加到模型中:
请注意,m=0。
接下来,命题2的规则用于添加delta;i(k)=1→Ui(k)=0给模型。这导致以下约束:
感兴趣的读者可以使用命题演算来推导出其他约束条件。
4. MLD-MPC
前面部分描述的AS/RS的动态模型可以使用命题演算翻译成混合逻辑动态(MLD)公式,如上所述。MLD配方具有以下形式:
其中x(k)是状态变量的向量,u(k)是控制动作的向量,其中uij(k),delta;(k)是布尔辅助变量的向量,z(k)是向量连续的辅助变量。
目标函数
性能指标J在事件步骤k被定义为:
其中alpha;1,alpha;2,alpha;3和alpha;4是权重因子。目标函数由以下部分组成:
bull;可以使用Jnode来使某些节点优先于其他节点以更快地加载或卸载它们,例如,希望对于到达的新货盘保持源节点为空。
bull;Jcrane用于缩短起重机搬运托盘的总时间。这是为了避免系统将起重机存放在起重机上,而不是将其装入节点。
bull;Jpenalty惩罚不必要的起重机移动。
bull;Jpallet尽力满足客户的需求。
性能指标(10)必须在约束(3)(6)下最小化。一旦在预测范围Np上计算了最佳控制动作的序列,则根据后退范围方法,仅应用第一事件步骤的值。整个过程在下一个事件步骤中重复。
目标Jnode可以用来为某些节点定义首选项。为此,使用以下布尔辅助变量:
通过将该变量乘以权重因子,当最小化性能指数时,系统将试图将托盘存储在具有较低权重因子而不是较高权重因子的节点中。这个公式表示为:
其中qi是对应于节点Ni的权重因子。
如前所述,Jcrane用于从一个节点卸下货盘,而不是将其保存在起重机上。通过定义eta;(k)布尔辅助变量,考虑起重机上托盘的存在:
这导致
为了节省能源,希望将起重机移动的总量最小化。这由Jpenalty代表。对于起重机和活塞的运动分别定义qc和qp的罚分会导致:
接下来将详细阐述Jpallet中客户满意度的定义。希望尽快满足客户需求。如果最终存储节点Nf中存在的托盘类型等于客户要求的托盘类型D(k),我们设置布尔辅助变量zeta;(k)=1:
这可以使用命题演算转换成线性形式。提出了以下客户满意度目标函数:
希望尽快满足客户,这意味着我们想要最大化,由于总目标函数Jpallet(k)将被最小化,所以目标函数由zeta;(k)的负和描述。
现在系统的目标函数和MLD模型已经转化为整数线性规划问题,可以使用适当的求解器进行优化。
5.案例研究
在实验室堆垛机上进行案例研究,以测试AS/RS上的MLDMPC应用。本节首先描述所使用的系统,然后讨论模拟结果。
实验室堆垛机
起重机位于意大利米兰理工大学电子,自动化和生物工程系的实验室。这是一台真正的堆垛机的比例模型。
存储设备可以在三个不同的级别上存储托盘,每个级别有四个可用于存储的位置。这意味着整个仓储
全文共7309字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16452],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 2.3港口吞吐量预测外文翻译资料
- 使用多标准移动通信分层遗传算法的阻抗 匹配网络的宽带优化外文翻译资料
- 移动RFID标签阅读与非重叠串联阅读器在输送带的应用外文翻译资料
- 利用数字图像进行的全场应变测量方法外文翻译资料
- 自然灾害中并发事件的多种应急资源的分配外文翻译资料
- 基于主机的卡仿真:开发,安全和生态系统影响分析外文翻译资料
- 实现基于Android智能手机的主机卡仿真模式作为替代ISO 14443A标准的Arduino NFC模块外文翻译资料
- 探索出行方式选择和出行链模式复杂性之间的关系外文翻译资料
- 信息系统研究、教育和实践的基本立场及其影响外文翻译资料
- 仓储和MH系统决策模型的设计优化与管理外文翻译资料

